Abschnittsübersicht
-
-
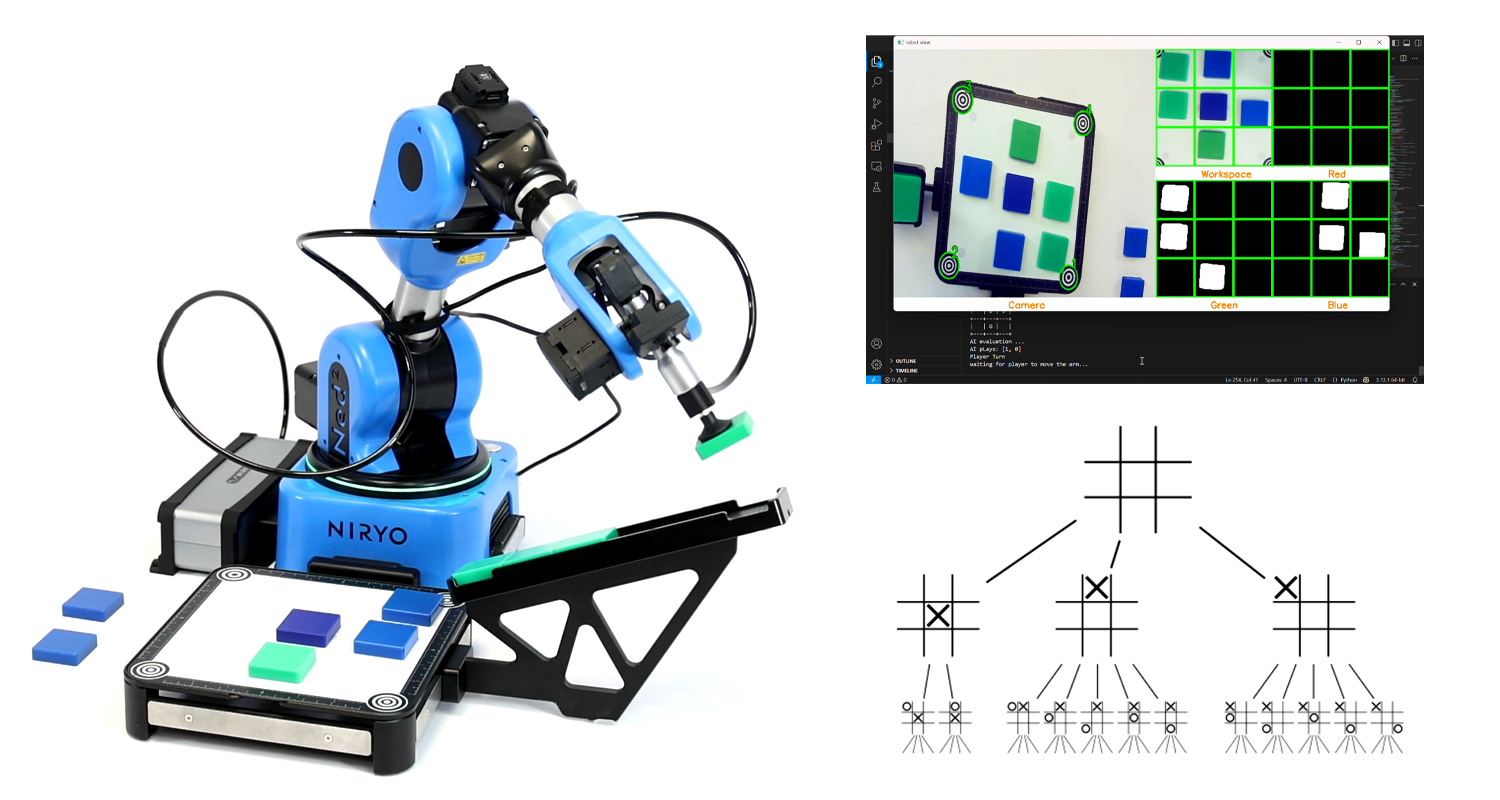
Sind Sie bereit, Ihre strategischen Fähigkeiten gegen einen Cobot zu testen? Dieses Tutorial führt Sie durch die Einrichtung einer interaktiven Tic-Tac-Toe (Mersch)-Anwendung, die Robotik und künstliche Intelligenz vereint.
Die Funktionsweise ist einfach, aber effektiv: Mithilfe des Vision Sets scannt der Ned2 das Spielfeld in Echtzeit, um die Position der Spielsteine zu identifizieren. Eine KI-Bibliothek, deren Schwierigkeitsgrad Sie selbst anpassen können, analysiert die Spielmatrix, um den besten Zug zu berechnen. Egal, ob Sie als Student die PyNiryo-API erkunden möchten oder als Lehrkraft eine konkrete Demonstration von KI suchen – dieses schlüsselfertige Projekt veranschaulicht perfekt das Zusammenspiel von visueller Wahrnehmung, softwarebasierter Entscheidungsfindung und robotischer Ausführung.
-