Achieve a smooth and precise pick & place through PID tuning
Pick & Place Challenge
Objective: program a pick & place sequence and obtain a wrist movement (axis 5) that is smooth, stable, and free of jerks during object placement.
Challenge to program
- The robot picks up an object at the pickup position.
- It places the object at position 1 with a specific wrist orientation.
- It returns to the pickup position and grabs another object.
- It places this second object at position 2 (possibly with a different orientation).
Example sequence
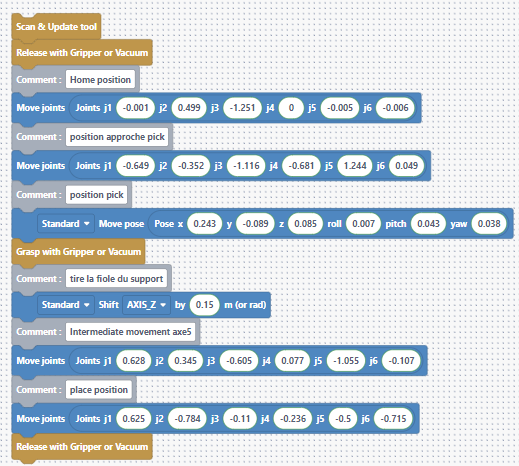
💡 Adjust j5 in your blocks/poses to set a clear orientation and observe the impact of PID parameters.
Visualize & analyze the curves
Run the sequence while displaying the plots for each motion in NiryoStudio’s PID module:
- Setpoint (axis 5 position reference)
- Actual (measured position)
- Error = setpoint − actual
Criteria to achieve
- No significant error spikes (especially during placement).
- Fast convergence of the actual position to the setpoint.
- Smooth, stable, and jerk-free wrist motion.
Example configurations (pick & place)
⚠️ Example values that clearly show the effects of each gain during a pick & place, without using extreme cases:
| P | I | D | Type | Observed behavior |
|---|---|---|---|---|
| 2000 | 0 | 0 | ⚠️ Unstable | Vibrations |
| 200 | 1200 | 0 | ⚠️ Unstable | Jerky movements |
| 100 | 0 | 3000 | ⚠️ Unstable | Axis 5 response too slow |