Presenter's guideline - WS2 : Conveyor & Sensor Integration
Step 5: Pick and Place from the Slope to the Conveyor
Action:
-
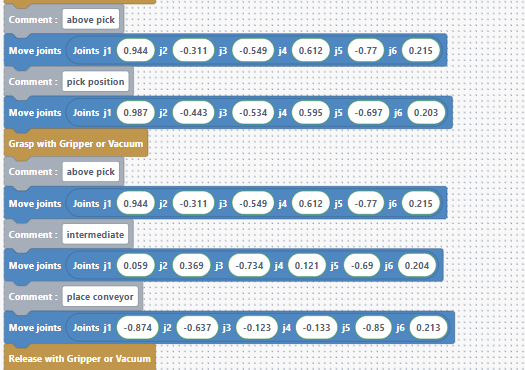
Move the robot using FreeMotion and save these positions in order:
-
Above the object at the bottom of the slope
-
On the object (grasp position)
-
Grasp action add the block manually
-
Copy/paste the above position from step 1 manually Ctrl +C , Ctrl + V
-
Intermediate high position between slope and conveyor (safe path)
-
Position above the start of the conveyor
-
Release action add the block manually
Speaker notes:
“First, I move above the object at the bottom of the slope and save the position. Then, I move down to the object, save again, and add a Grasp action to close the gripper.”
“I copy-paste the position above the object to lift the object safely, then take an intermediate position between the slope and the conveyor, high enough to avoid obstacles.”
“Finally, I move above the start of the conveyor and save this position.”