Bac Pro MSPC
BUT GIM
BUT GMP
Engineering Program

About the Author:
Franck JULLIEN & Pierre-Alain BARRY
Enseignant - SII ingénierie mécanique
IUT de Chambéry
Franck JULLIEN et Pierre-Alain BARRY interviennent sur les compétences de conception de packaging et d’industrialisation des solutions d’emballage ou de conditionnement. Ils utilisent les cobots avec leurs étudiants par exemple pour réaliser des opérations de « pick and place » ou de simulation de palettisation.
Required Materials
Niryo Materials:
Other Materials: RoboDK
📋 Project Overview
🔎 Summary
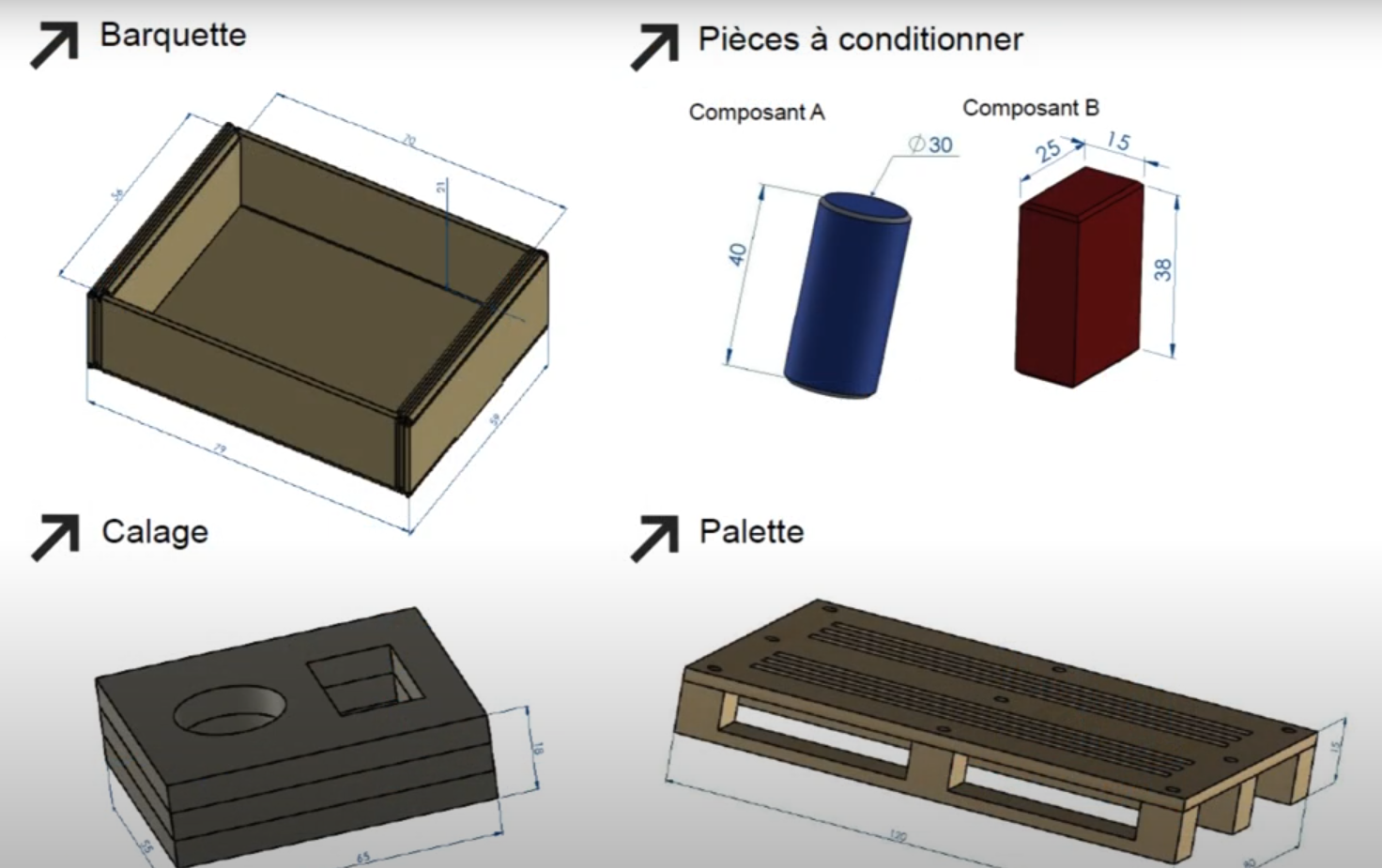
The project: build an automated packaging line for two types of components into corrugated cardboard trays with blister packs, and palletize them.
📝 Full Project Instructions
The project: build an automated packaging line for two types of components into corrugated cardboard trays with blister packs, and palletize them.
Required equipment:
- 3x Niryo robots (NED2 or here 1x Niryo One and 2x NED2)
- 2x conveyors
- 2x customizable grippers
- 1x vacuum pump
- Additional parts:
Part 1: Workstation design and 3D modeling
For station 1:
- Suction cup holder
- Spacer/positioning magazine
- Feeder ramp
For station 2:
- Feeder ramp
- Custom jaws (to be mounted on the customizable gripper)
For station 3:
- Custom jaws (to be mounted on the customizable gripper)
- AGV support (for pallet storage)
Part 2: Digital twin modeling and simulation
Use the simulation software RoboDK to simulate stations 1, 2 and 3 and to break down the operation sequences.
Part 3: Building the robotic cell
Programming of each robot's sequence on NiryoStudio, with Blockly.
Install the three workstations to create the production line:
- Station 1: pick up trays and insert positioning spacers
- Station 2: place the components to be packaged into the trays, then start the conveyor
- Station 3: pick up the filled tray and place it on the pallet. When two trays have been placed on the pallet, activate the conveyor and retrieve a new empty pallet.
The three workstations are synchronized using their input and output signals.
📎 Attached Files