Bac Pro MSPC
BUT GIM
BUT GMP
Engineering Program

About the Author:
Franck JULLIEN & Pierre-Alain BARRY
Enseignant - SII ingénierie mécanique
IUT de Chambéry
Franck JULLIEN et Pierre-Alain BARRY interviennent sur les compétences de conception de packaging et d’industrialisation des solutions d’emballage ou de conditionnement. Ils utilisent les cobots avec leurs étudiants par exemple pour réaliser des opérations de « pick and place » ou de simulation de palettisation.
Required Materials
Niryo Materials:
Other Materials: RoboDK
📋 Project Overview
🔎 Summary
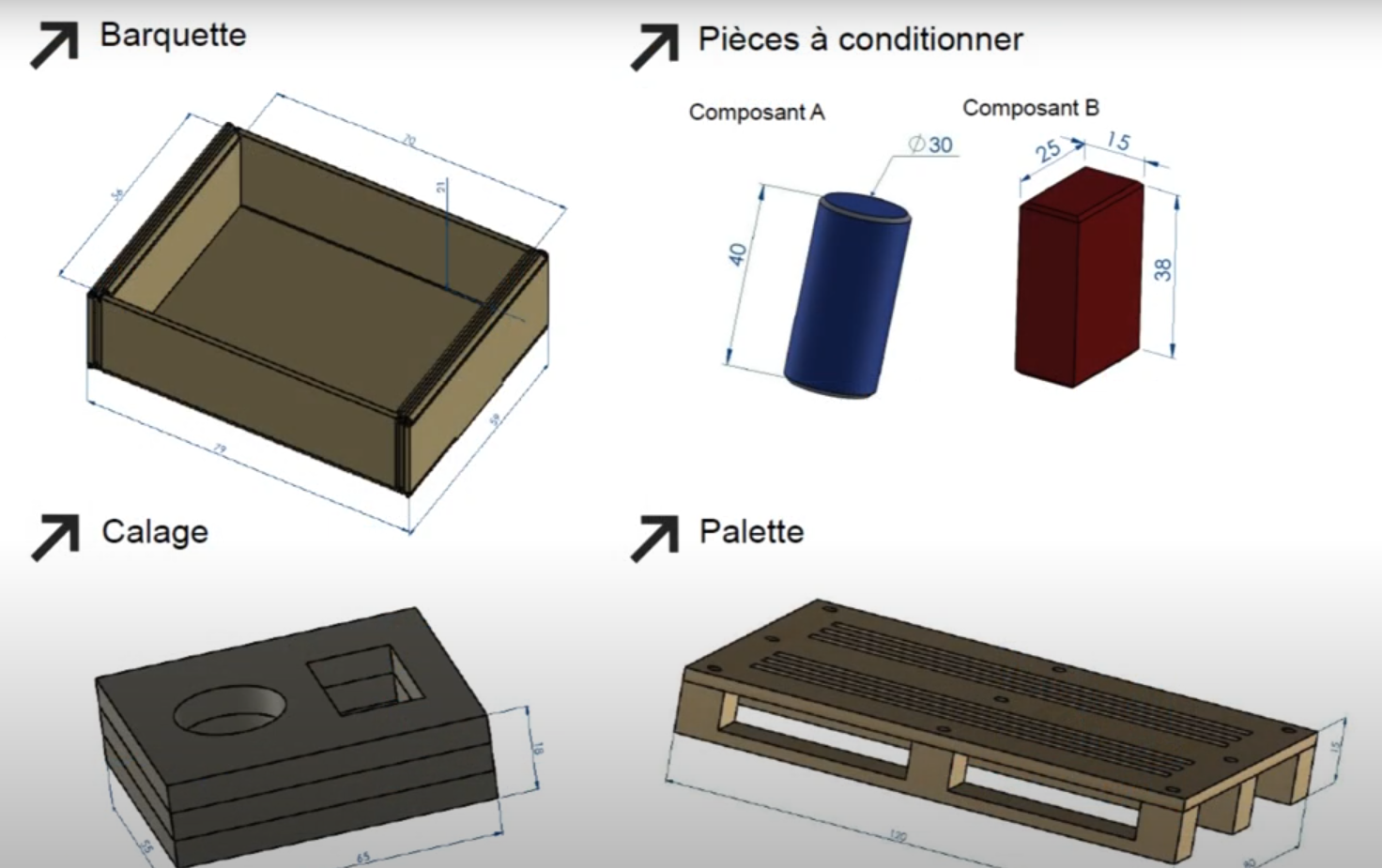
Le projet: réaliser une ligne automatisée de conditionnement de 2 types de composants dans des barquettes en carton ondulé doté de blister et les palettiser.
📝 Full Project Instructions
Le projet: réaliser une ligne automatisée de conditionnement de 2 types de composants dans des barquettes en carton ondulé doté de blister et les palettiser.
Matériel requis:
- 3x robots Niryo (NED2 ou ici 1x NiryoOne et 2x NED2)
- 2x convoyeurs
- 2x préhenseurs personnalisables
- 1x pompe à vide
- Pièces supplémentaires:
Partie 1: Conception et modélisation 3D des postes de travail
Pour le poste 1:
- Support ventouses
- Magasin calage
- Rampe
Pour le poste 2:
- Rampe
- Mors adaptés (à fixer sur le préhenseur personnalisable)
Pour le poste 3:
- Mors adaptés (à fixer sur le préhenseur personnalisable)
- Support AGV (pour stockage des palettes)
Partie 2: Modélisation du jumeau numérique et simulation
Utilisation du logiciel de simulation RoboDK pour simulation des postes 1, 2 et 3 et décomposition des séquences.
Partie 3: Réalisation de la cellule robotique
Programmation des séquences de chaque robot sur NiryoStudio en Blockly.
Installation des 3 postes de travail pour création de la chaîne:
- Poste 1: saisie des barquettes et insertion des calages
- Poste 2: dépose des pièces à conditionner dans les barquettes puis lancement du convoyeur
- Poste 3: saisie de la barquette remplie et dépose sur la palette. Lorsque deux barquettes sont déposées sur la palette, activation du convoyeur et récupération d'une nouvelle palette vide.
La synchronisation des 3 postes se fait à l'aide des entrées / sorties.
📎 Attached Files