Engineering Program
Computer Science
About the Author:
INSA Strasbourg
This project is based entirely from the development work conducted by:
Their work, titled:
“AI-Driven Industrial Automation: Optimizing Vertical Logistics and Storage with Robotic Arms for Enhanced Efficiency”
is fully documented in the following publication:🔗 IEEE-Article_-DENGUIR_AZZOUZI_SHAO_modified.pdf
Required Materials
Niryo Materials:
Other Materials: Siemens ET200SP PLC, Siemens TP700 Comfort Human-Machine Interface (HMI) , Jetson Nano
📋 Project Overview
🔎 Summary
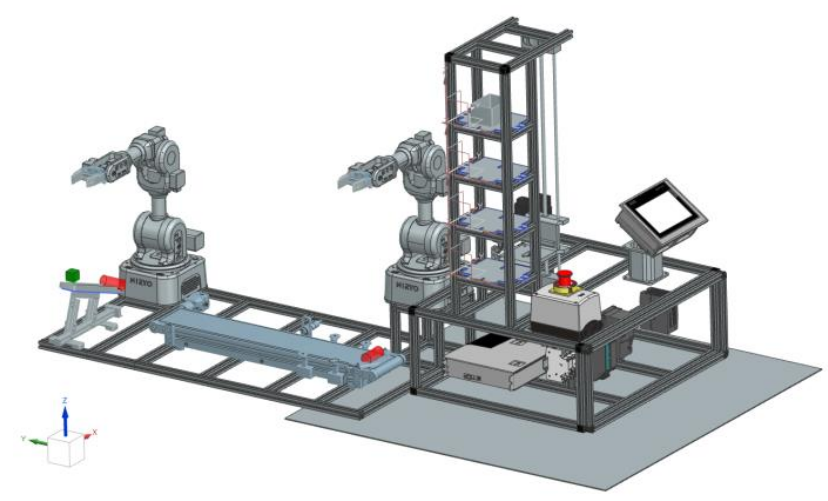
This project aims to develop an industrial automation system leveraging artificial intelligence (AI) and robotic arms to enhance efficiency in vertical logistics and storage in an industrial application. The primary goal is to implement through AI robots with real-time decision-making capabilities, optimizing handling, sorting, and storage operations. The proposed solution is meant to increase productivity, reduce errors, and optimize the utilization of available space.
The available materials include Siemens ET200SP PLC, Siemens TP700 Comfort Human-Machine Interface (HMI), Niryo NED 2 robotic arm, a conveyor system, Jetson Nano with a camera, and a small-scale model for vertical storage
📝 Full Project Instructions
Project Scope and Objectives
The project focuses on AI-driven industrial automation using:
-
Siemens ET200SP PLC and TP700 Comfort HMI
-
Dual Niryo NED 2 robotic arms
-
Jetson Nano (for AI-based vision and control)
-
Vertical storage systems
-
Digital twin modeling with NX and SIMIT
The goal is to improve efficiency, error reduction, and space utilization in vertical logistics and storage systems.
🏷️ Tags
AI
Modbus
Python
Multi-robot