Artificial intelligence
Kurse mit 'Artificial intelligence' markiert
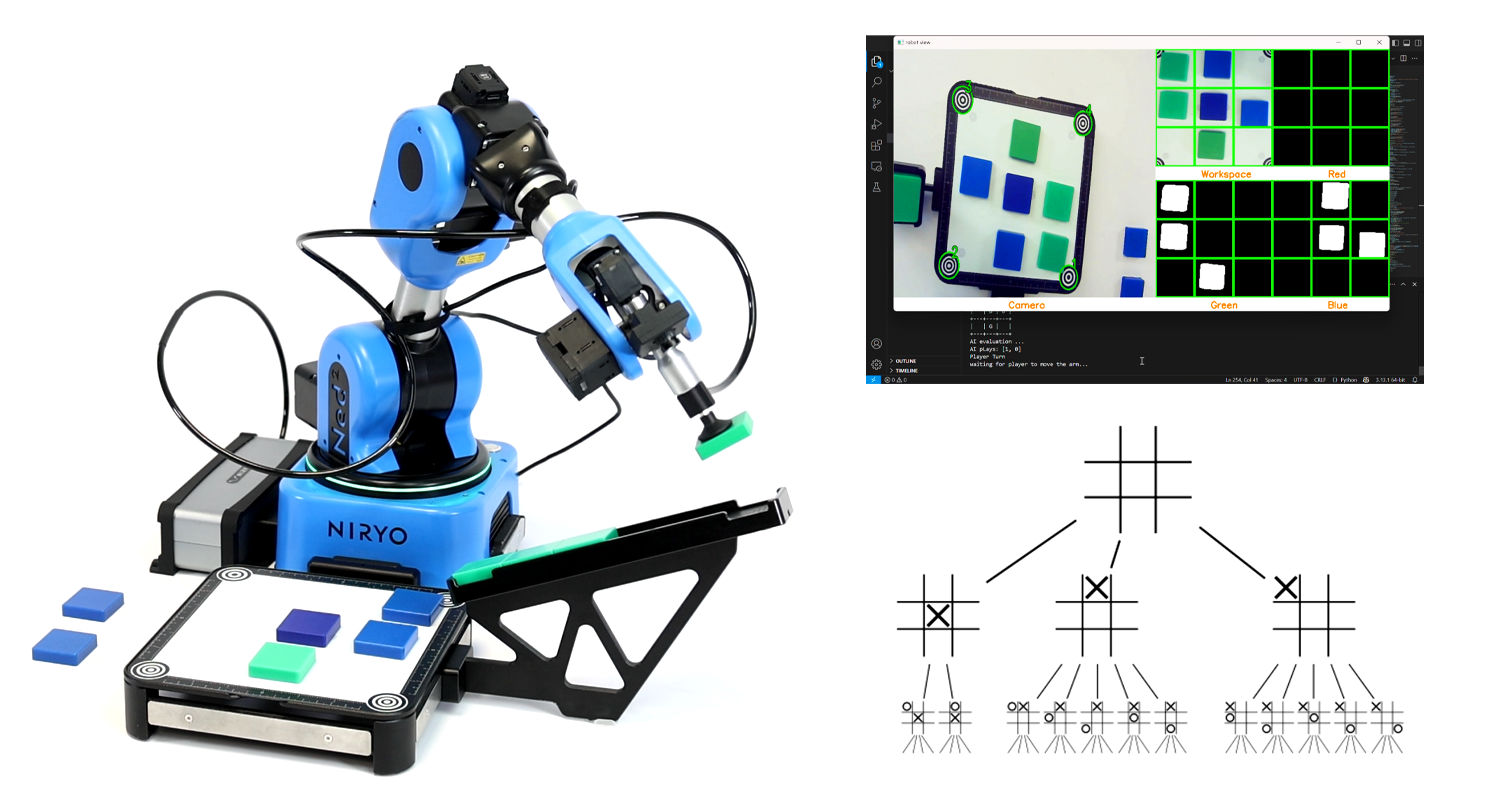
Spiele Tic Tac Toe
- Content Type: Tutorial
- Programming: Python
- Equipment: Ned2
- Eingeschriebene Teilnehmer/innen: In diesem Kurs sind noch keine Teilnehmer/innen eingeschrieben.

Visuelle Kommissionierung mit Künstlicher Intelligenz unter Verwendung von TensorFlow
- Content Type: Tutorial
- Programming: Python
- Equipment: Ned2
- Eingeschriebene Teilnehmer/innen: In diesem Kurs sind noch keine Teilnehmer/innen eingeschrieben.

Introduction to Imitation Learning AI interfacing Niryo and LeRobot
- Content Type: Project
- Programming: Python
- Equipment: Ned2
This course is a practical, deep-dive journey into the world of End-to-End Learning for robotics. Instead of manually programming every joint movement with rigid code, you will learn how to "teach" the Niryo Ned2 cobot using LeRobot, the state-of-the-art framework from Hugging Face.
By the end of this program, you will have moved beyond traditional automation into the realm of Physical AI, where robots learn complex behaviors through demonstration and imitation.
Who Is This For?
This course is designed for those who want to stop theorizing about AI and start seeing it move in the physical world:
-
Robotics Engineers & Students: Looking to integrate modern ML workflows into their existing hardware setups.
-
AI Practitioners: Eager to move beyond computer vision or NLP and explore "Embodied AI" on real-world devices.
-
Makers & Educators: Who want a structured path to using professional-grade open-source tools like LeRobot.
-
Prerequisites: A basic comfort level with Python and a Niryo Ned2 robot (or access to one).
Course Content:
Part 1: AI applied to robotics & LeRobot Framework
Part 2: Interfacing Niryo Ned2 and LeRobot
Part 3: Create your first DatasetPart 3.2: Record your first dataset
Part 4: Train your own AI modelPart 4.2: Training your first own policy
- Eingeschriebene Teilnehmer/innen: 17
Die Erkundung der KI-gesteuerten Zusammenarbeit in der Robotik
- Length: 8h
- Content Type: Lab
- Programming: Python
- Equipment: Bundle discovery
Szenario
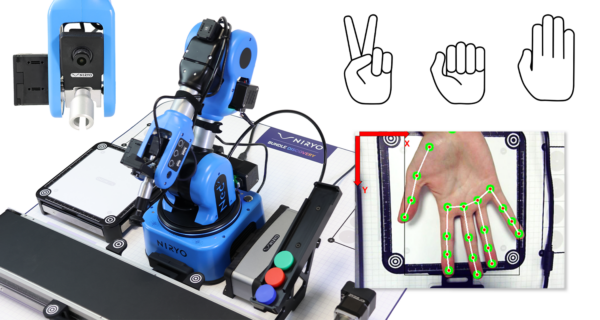
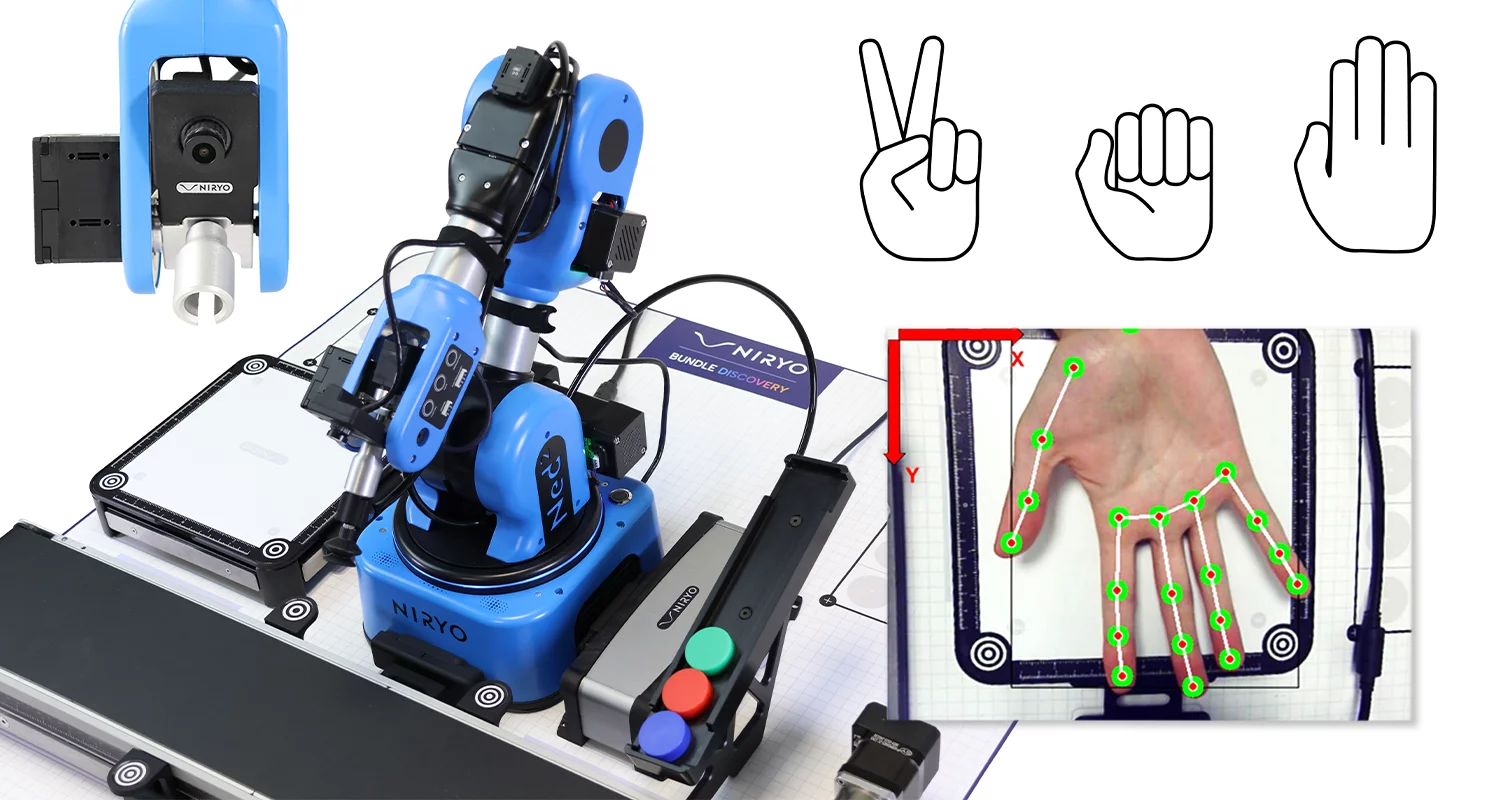
Das Szenario ermöglicht die Interaktion zwischen einem Bediener und dem Roboterarm NED2, mithilfe von Schnittstellen, die auf künstlicher Intelligenz basieren. Insbesondere kann der Bediener durch Gesten das Teil auswählen, das vom Roboterarm NED2 aufgenommen werden soll – jede Geste entspricht dabei einem Teil aus einer in der Alpha-Zone angeordneten Sammlung. Der Roboterarm NED2 legt das gegriffene Teil in die Hand des Bedieners, nachdem er mithilfe der Vision-Set-Kamera die Position oberhalb der Ladezone identifiziert hat. Dies ist eine Pick-and-Place-Sequenz, bei der die Aufnahme- und Ablagepunkte in Echtzeit durch die Gestenbefehle des Bedieners vorgegeben werden. Die Erkennung der Gesten und der Handposition erfolgt mit Deep-Learning-Werkzeugen.
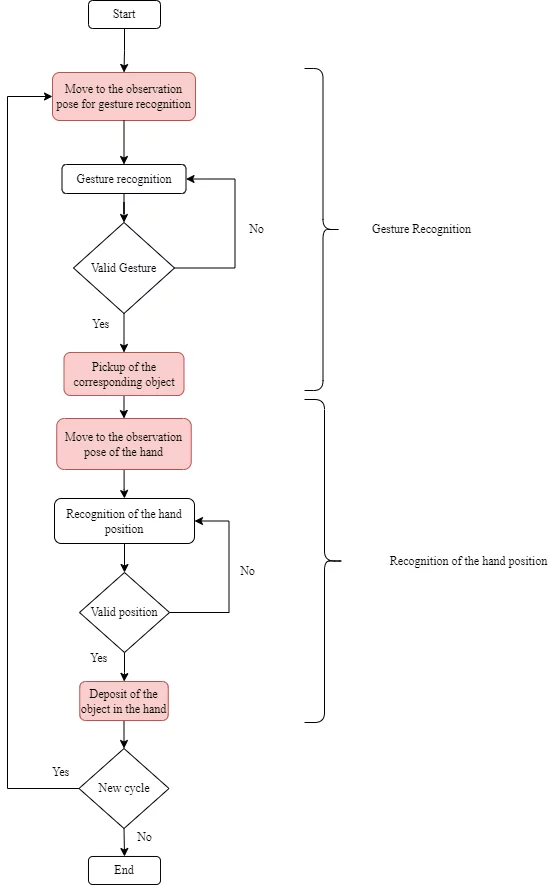
Das Ziel des Szenarios besteht darin, diesen Vorgang anhand der im folgenden Algorithmus dargestellten Schritte auszuführen:
Inhalt des Labors
Kapitel 1: Pick and Place
- Interessante Punkte definieren
- Bewegungen für Pick and Place erstellen
Kapitel 2: Gestenerkennung
- Verwendung von Teachable Machine zum Trainieren eines Modells erlernen
- Vorhersagen auf Grundlage von Gesten erhalten
- Einen Filter erstellen, um eine Geste zu validieren
Kapitel 3: Handerkennung
- Die Hand im Kamerabild erkennen
- Die Kamera kalibrieren
- Die Koordinaten des Ablagepunkts in der Mitte der Hand bestimmen
Kapitel 4: Integration
- Die Teilprogramme in ein komplexes und funktionales Programm integrieren
Vorkenntnisse
Python: Grundlegende Syntax + einfache Daten- und Kontrollstrukturen + Schleifen + einfache Funktionsaufrufe
Bezugssysteme und Transformationen: Verstehen, wie kartesische Koordinatensysteme funktionieren und das Prinzip von Transformationen
Erforderliche Ausstattung





- Eingeschriebene Teilnehmer/innen: 161