Artificial intelligence
Courses tagged with "Artificial intelligence"
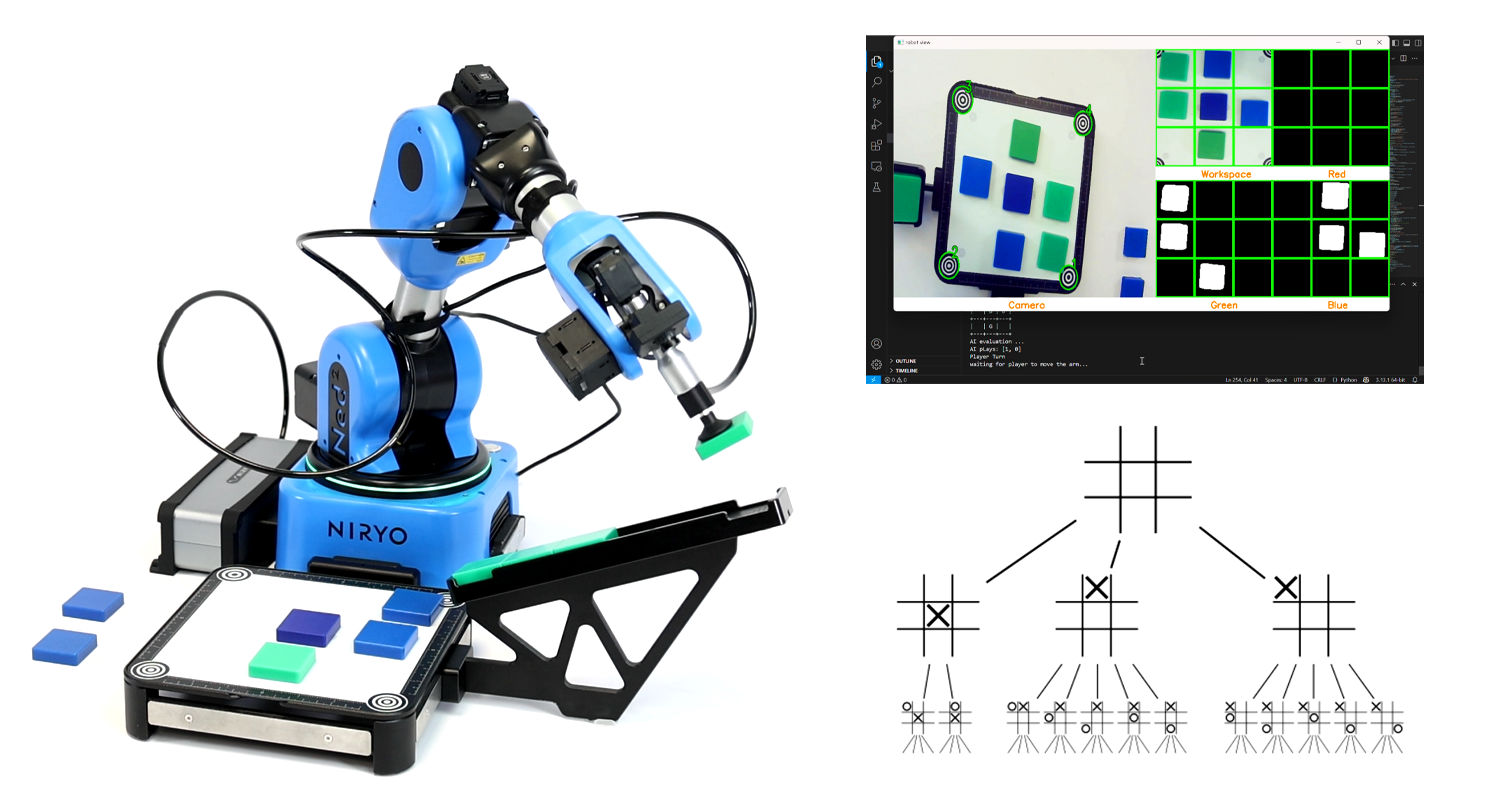
Play Tic Tac Toe
- Content Type: Tutorial
- Programming: Python
- Equipment: Ned2
- Enrolled students: There are no students enrolled in this course.

Visual picking with Artificial Intelligence using TensorFlow
- Content Type: Tutorial
- Programming: Python
- Equipment: Ned2
- Enrolled students: There are no students enrolled in this course.

Introduction to Imitation Learning AI interfacing Niryo and LeRobot
- Content Type: Project
- Programming: Python
- Equipment: Ned2
This course is a practical, deep-dive journey into the world of End-to-End Learning for robotics. Instead of manually programming every joint movement with rigid code, you will learn how to "teach" the Niryo Ned2 cobot using LeRobot, the state-of-the-art framework from Hugging Face.
By the end of this program, you will have moved beyond traditional automation into the realm of Physical AI, where robots learn complex behaviors through demonstration and imitation.
Who Is This For?
This course is designed for those who want to stop theorizing about AI and start seeing it move in the physical world:
-
Robotics Engineers & Students: Looking to integrate modern ML workflows into their existing hardware setups.
-
AI Practitioners: Eager to move beyond computer vision or NLP and explore "Embodied AI" on real-world devices.
-
Makers & Educators: Who want a structured path to using professional-grade open-source tools like LeRobot.
-
Prerequisites: A basic comfort level with Python and a Niryo Ned2 robot (or access to one).
Course Content:
Part 1: AI applied to robotics & LeRobot Framework
Part 2: Interfacing Niryo Ned2 and LeRobot
Part 3: Create your first DatasetPart 3.2: Record your first dataset
Part 4: Train your own AI modelPart 4.2: Training your first own policy
- Enrolled students: 17
Exploring AI-Driven Collaboration in Robotics
- Length: 8h
- Content Type: Lab
- Programming: Python
- Equipment: Bundle discovery
Scenario
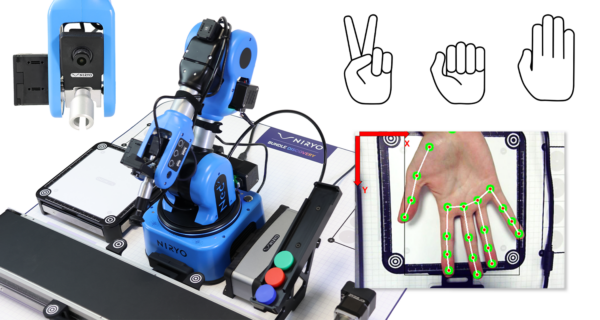
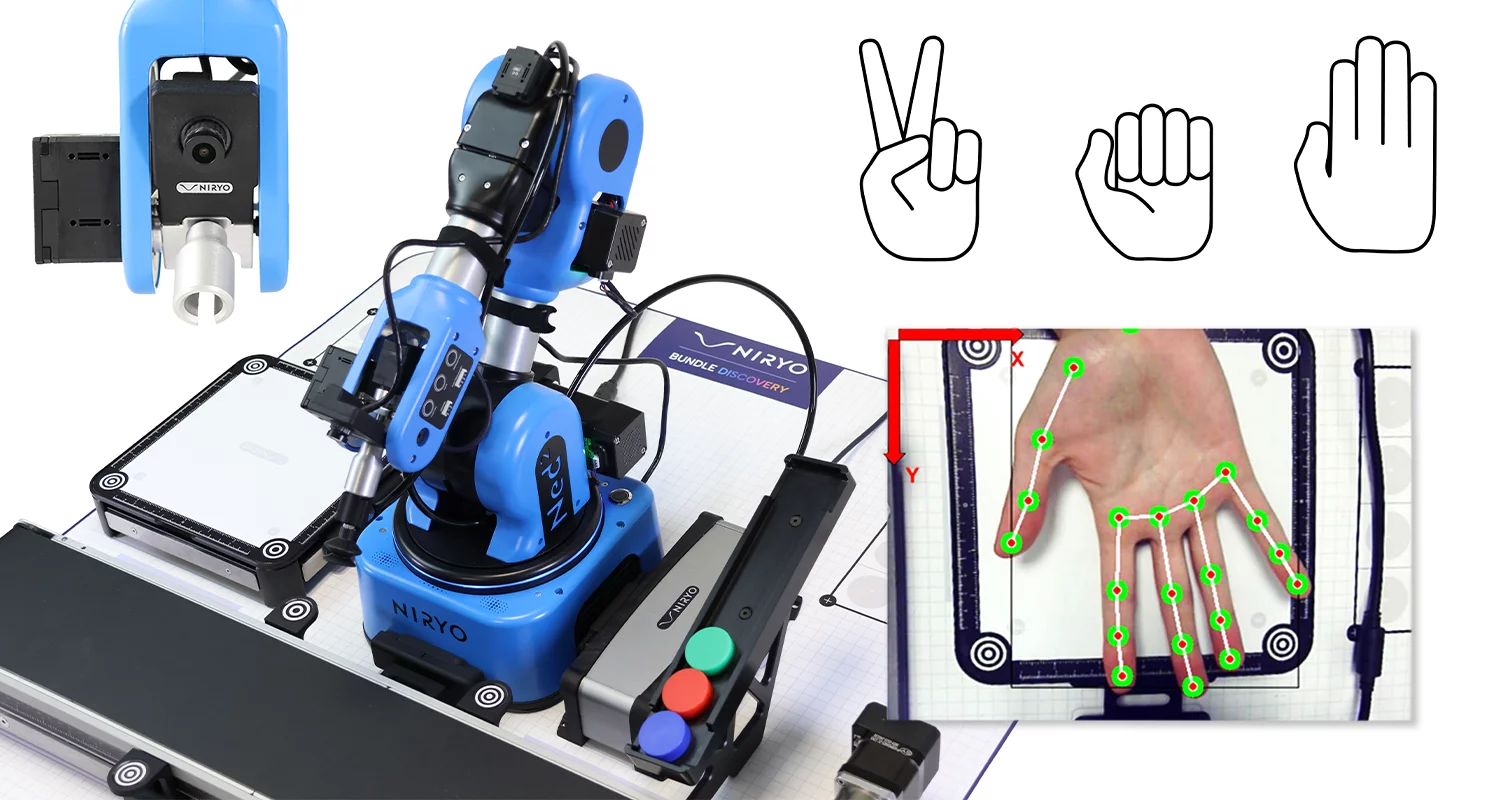
The scenario enables interaction between an operator and a Robotic arm NED2, using interfaces based on artificial intelligence. In particular, the operator can use gestures to designate the part to be picked up by the Robotic arm NED2, one gesture corresponding to a part from a collection arranged in the alpha zone. The Robotic arm NED2 places the gripped part in the operator’s hand, after identifying its position using the vision set camera, above the loading zone. This is a pick-and-place sequence, where the pick and place points are provided in real time by the operator’s gesture commands. Gesture and hand position recognition is performed by deep learning tools.
The objective of the scenario is to perform this operation by following the steps illustrated in the following algorithm:
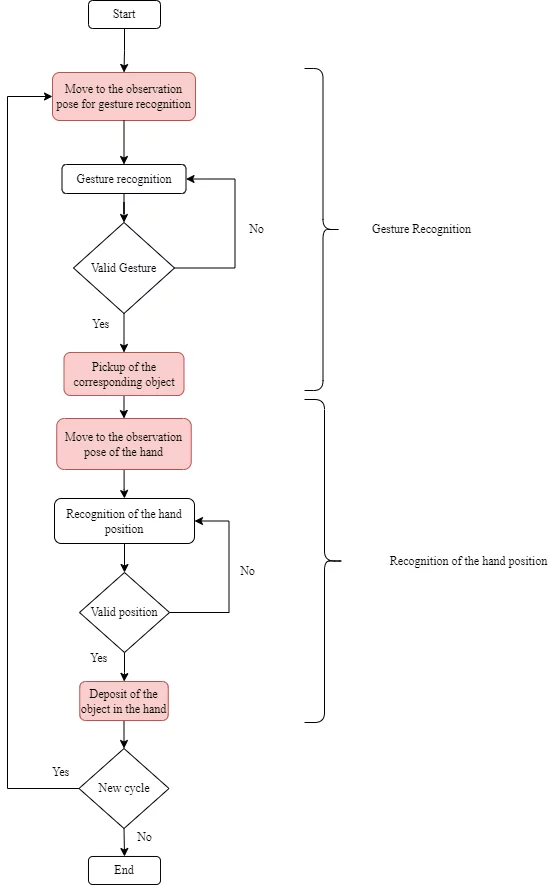
Lab Contents
Chapter 1: Pick and Place
- Define points of interest
- Create movements for pick and place
Chapter 2: Gesture recognition
- Know how to use Teachable Machine to train a model
- Obtain predictions based on gestures
- Create a filter to validate a gesture
Chapter 3: Hand detection
- Detect the hand in the camera image
- Calibrate the camera
- Obtain the coordinates of the drop point in the middle of the hand
Chapter 4: Integration
- Integrate the subprograms into a complex and functional program
Prerequisite knowledge
Python: Basic syntax + simple data and control structures + loops + simple function calls
Reference frames and transformation: Understanding how Cartesian coordinate systems work and the principle of transformations
Required Equipment





- Enrolled students: 161