Artificial intelligence
Cours signalées avec « Artificial intelligence »
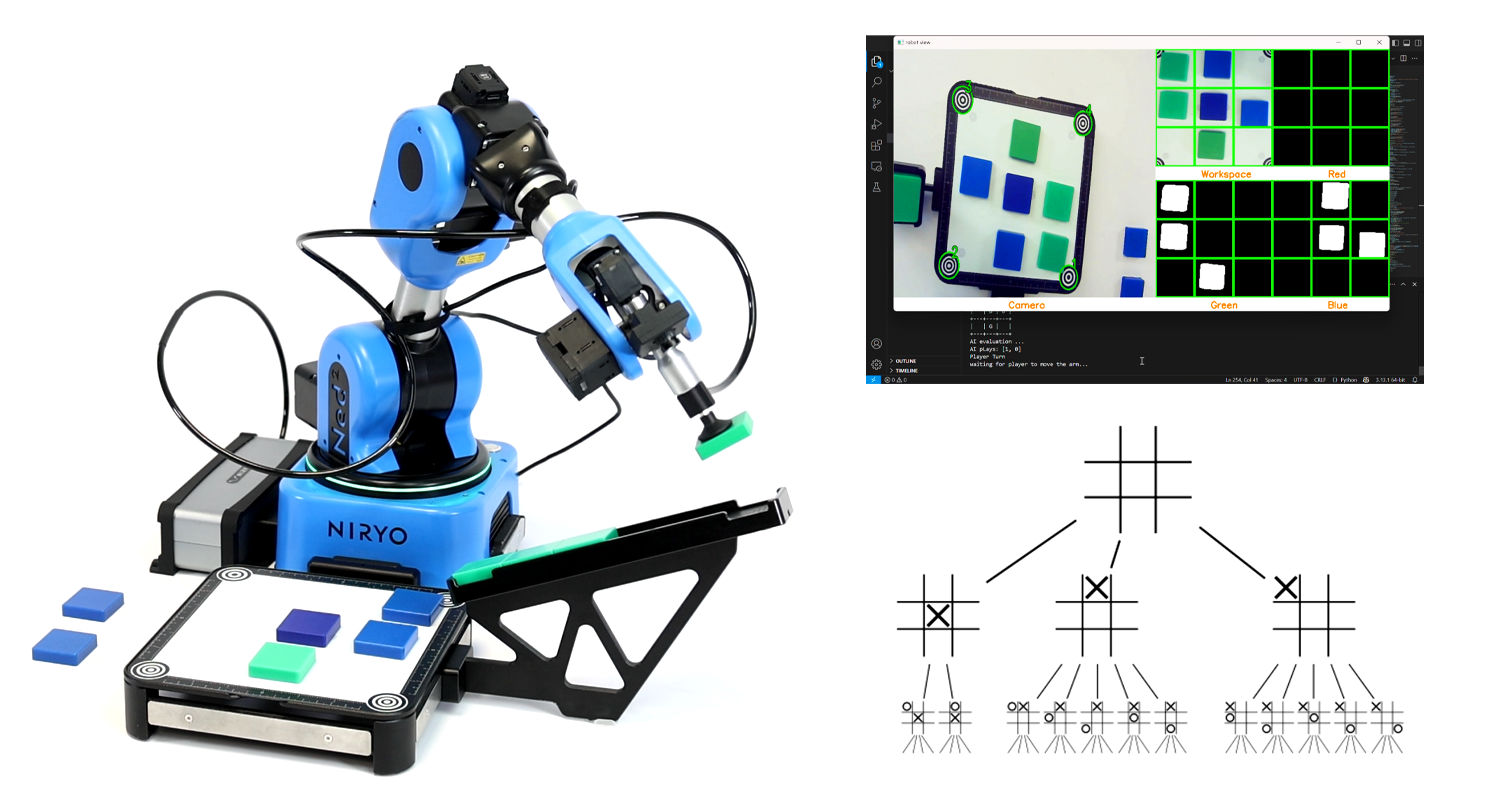
Le jeu du Morpion
- Content Type: Tutorial
- Programming: Python
- Equipment: Ned2
- Étudiants inscrits: Il n’y a encore aucun étudiant inscrit à ce cours.

Attraper vos objets avec l'IA en utilisant TensorFlow
- Content Type: Tutorial
- Programming: Python
- Equipment: Ned2
- Étudiants inscrits: Il n’y a encore aucun étudiant inscrit à ce cours.

Introduction to Imitation Learning AI interfacing Niryo and LeRobot
- Content Type: Project
- Programming: Python
- Equipment: Ned2
This course is a practical, deep-dive journey into the world of End-to-End Learning for robotics. Instead of manually programming every joint movement with rigid code, you will learn how to "teach" the Niryo Ned2 cobot using LeRobot, the state-of-the-art framework from Hugging Face.
By the end of this program, you will have moved beyond traditional automation into the realm of Physical AI, where robots learn complex behaviors through demonstration and imitation.
Who Is This For?
This course is designed for those who want to stop theorizing about AI and start seeing it move in the physical world:
-
Robotics Engineers & Students: Looking to integrate modern ML workflows into their existing hardware setups.
-
AI Practitioners: Eager to move beyond computer vision or NLP and explore "Embodied AI" on real-world devices.
-
Makers & Educators: Who want a structured path to using professional-grade open-source tools like LeRobot.
-
Prerequisites: A basic comfort level with Python and a Niryo Ned2 robot (or access to one).
Course Content:
Part 1: AI applied to robotics & LeRobot Framework
Part 2: Interfacing Niryo Ned2 and LeRobot
Part 3: Create your first DatasetPart 3.2: Record your first dataset
Part 4: Train your own AI modelPart 4.2: Training your first own policy
- Étudiants inscrits: 17
Exploration de la Collaboration Robotique Pilotée par l’IA
- Length: 8h
- Content Type: Lab
- Programming: Python
- Equipment: Bundle discovery
Scenario
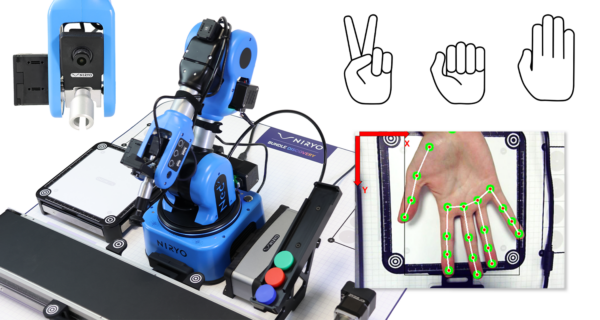
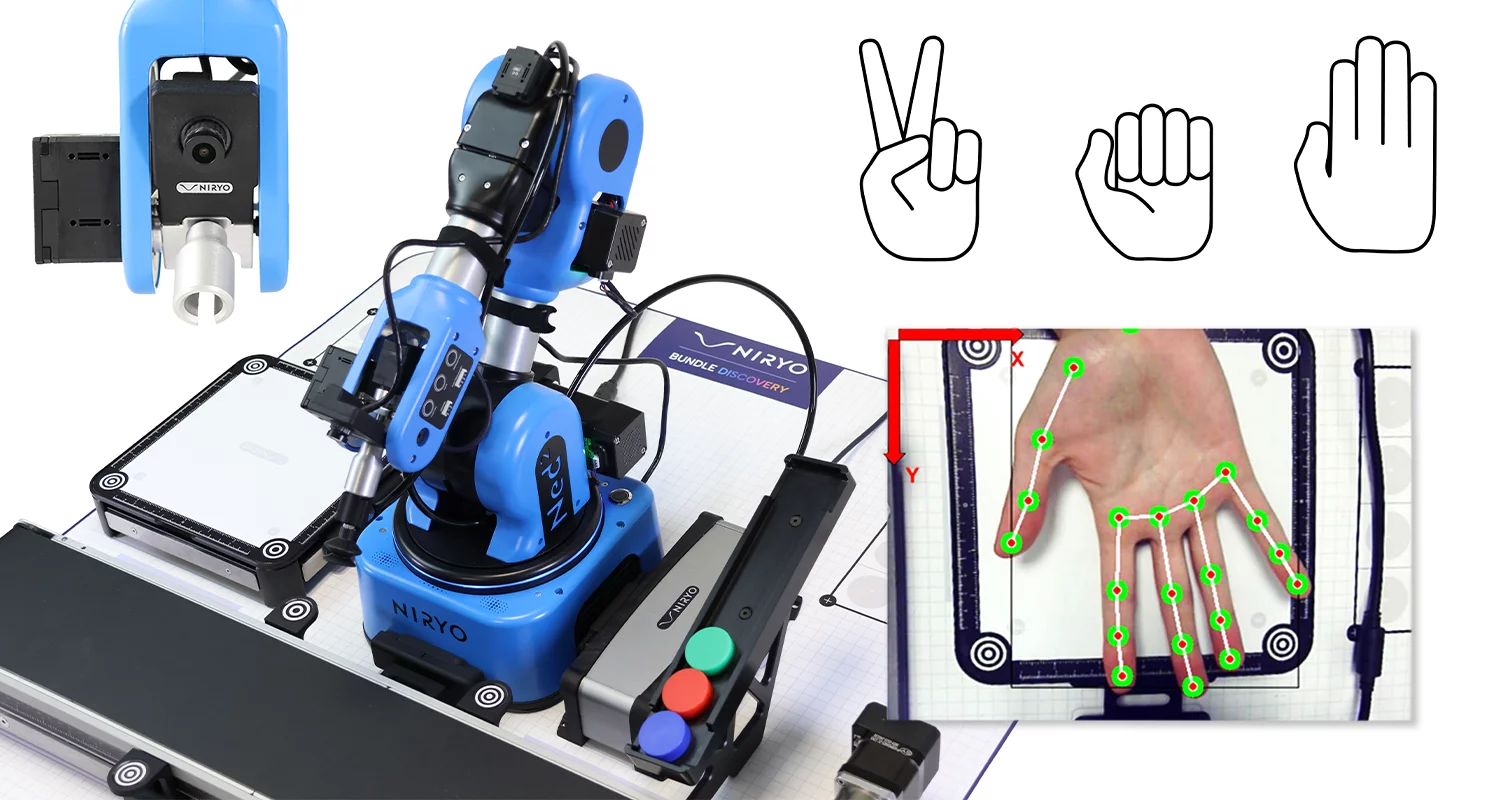
Le scénario permet de réaliser des interactions entre un opérateur et un robot collaboratif à l’aide d’interfaces issues de l’intelligence artificielle. En particulier, l’opérateur peut désigner la pièce à saisir par le robot avec des gestes, un geste correspondant à une pièce parmi une collection disposée dans la zone alpha. Le robot place la pièce saisie dans la main de l’opérateur, après l’identification de sa position dans le champ visuel de la caméra du kit vision, au-dessus de la zone de chargement. Il s’agit donc d’une séquence de pick and place, où les points de prise et de dépose sont fournis en temps réel par l’opérateur par commande gestuelle. La reconnaissance des gestes et de la position de la main est effectuée par des outils de deep learning.
L’objectif du scénario est de réaliser cette opération en suivant les étapes, qui sont illustrées dans l’algorithme suivant :
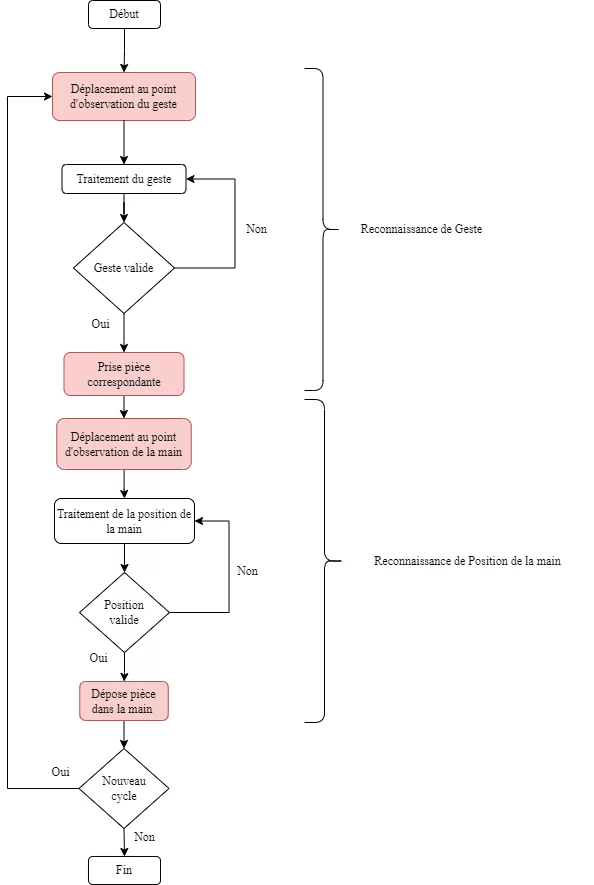
Contenu du TP
Chapitre 1 : Pick and place
- Définir les points d'intérêt
- Créer les mouvements pour le pick and place
Chapitre 2 : Reconnaissance de gestes
- Savoir utiliser Teachable Machine pour entrainer un modèle
- Obtenir des prédictions en fonctions des gestes
- Créer un filtre permettant de valider un geste
Chapitre 3 : Détection de la main
- Détecter la main dans l’image de la caméra
- Calibrer la caméra
- Obtenir les coordonnées du point de dépose au milieu de la main
Chapitre 4 : intégration
- Integrer les sous programmes dans un programme complex et fonctionnel
Prérequis
Python: Syntaxe de base + structure de donnée et de contrôle simple et loop + appel de fonction simple
Repère et transformation : Comprendre comment fonctionne les repères cartésiens et la principe des transformation
Équipements requis





- Étudiants inscrits: 161