IoT
Cours signalées avec « IoT »

Projet Préparation de Commandes Robotisé et Connecté avec RFID
- Length: 3-6 weeks
- Content Type: Project
- Programming: Python
- Equipment: Ned2
Bienvenue dans ce projet d'ingénierie axé sur la robotique, l'automatisation et l'intégration de systèmes. Votre mission est de travailler au sein d'une équipe d'ingénierie multidisciplinaire pour concevoir, construire et intégrer un système robotique de préparation de commandes entièrement fonctionnel.
Ce projet simule un défi réel de laboratoire de robotique éducative où plusieurs équipes doivent collaborer pour créer une solution complète impliquant :
-
Une interface web permettant aux opérateurs de gérer les commandes
-
Un serveur backend + une base de données pour stocker et traiter les données de commande
-
Un contrôleur de robot qui exécute le flux de travail de prélèvement (picking)
-
Un système d'identification RFID pour détecter les objets automatiquement
À la fin de ce projet, votre système devra être capable de :
✅ Recevoir une commande
✅ Identifier les articles en stock via la RFID
✅ Utiliser un robot pour collecter les objets requis
✅ Mettre à jour le système pour marquer les commandes comme terminées
Ceci n'est pas un exercice de type « étapes à suivre », c'est un véritable défi d'ingénierie.
Vous devrez proposer des conceptions, justifier vos choix, tester, déboguer et intégrer votre travail avec celui des autres équipes.
- Étudiants inscrits: 15
Tri de marchandises sous supervision d’un serveur Web
- Length: 6h
- Content Type: Lab
- Programming: Python
- Equipment: Bundle STEM
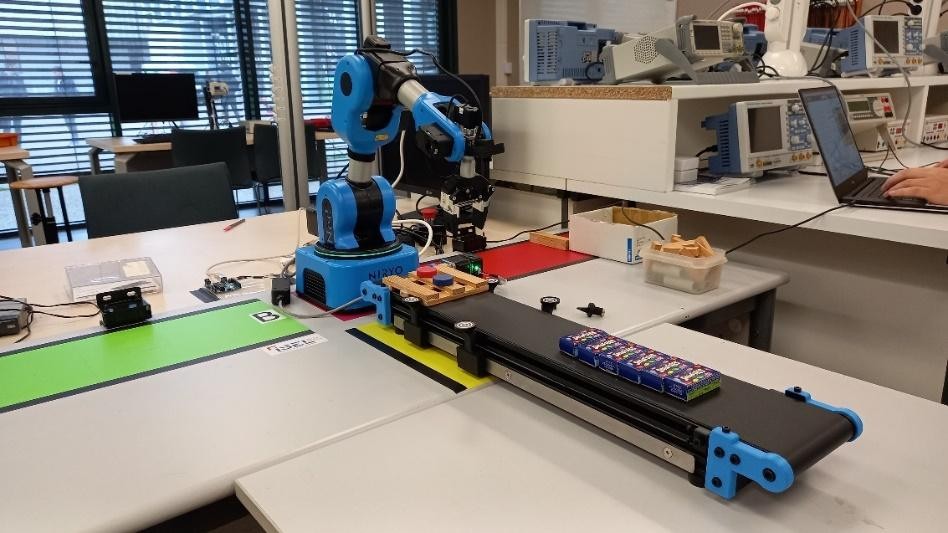
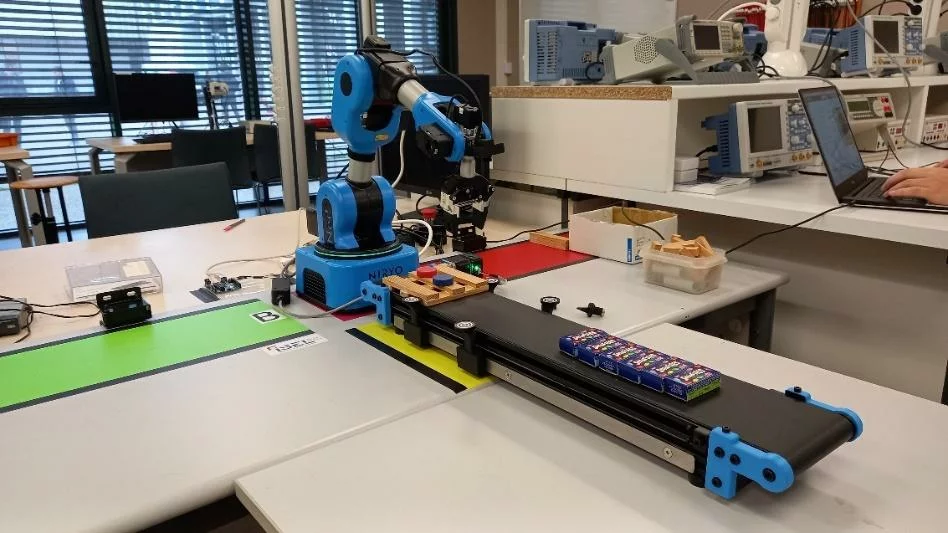
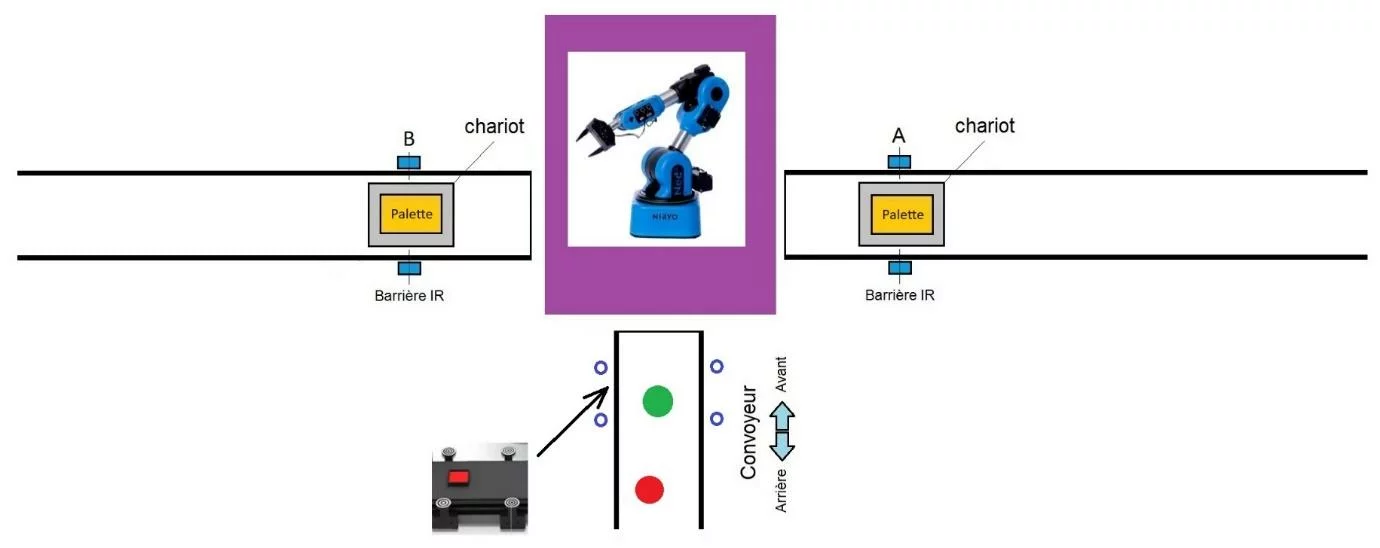
Le TP a pour objectif de reproduire une opération robotisée de tri de marchandises et de palettisation en entrepôt logistique sous la supervision d’un serveur web (figure 1). Les marchandises (palets rouges et verts) sont déposées aléatoirement par un opérateur et transportées par le convoyeur. Arrivées en zone de préhension (figure 2), le convoyeur s’arrête et les marchandises (palets rouges et verts) sont localisées et identifiées par la caméra placée à l’extrémité du bras manipulateur. La pince à deux doigts, montée à l’extrémité du bras, attrape le palet et le dépose selon sa couleur, sur une palette en zone A (rouge) ou en zone B (vert) en vue de la livraison vers deux destinations différentes.
Contenu du TP
Chapitre 1: Setup du serveur
- Comprendre les liens existants entre le code « Python » et la page WEB
Chapitre 2: Contrôler le convoyeur
- Le but de ce chapitre est de mettre en oeuvre les commandes Python qui permettront de contrôler le convoyeur
Chapitre 3: Pick and Place avec Vision
- Maîtriser la séquence des mouvements nécessaires pour la prise d’une pièce par la vision et la dépose dans la zone dédiée, sans entrer en collision avec l’environnement
Chapitre 4: Base de données
- Développer les compétences en manipulation de bases de données avec Python, et en interaction avec une interface utilisateur pour consulter et exporter des données
Équipements requis



![]()
Prérequis
Programmation :
- Notions de base de l’algorithmique et du langage Python
- Utilisation simple des bases de données en Python
Réseaux & Communication :
- Notions de base sur les réseaux
Installation
- NyrioStudio
- Python 3
- Flask, Sqlite3
- Étudiants inscrits: 160