About the course
Scenario
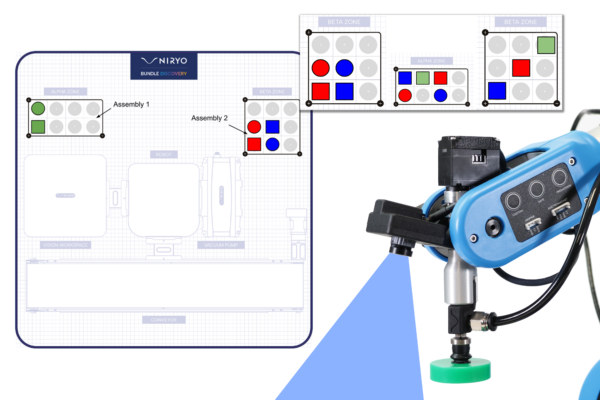
We want to carry out an assembly that involves arranging specific manipulable objects (shape and color) in the ALPHA and BETA zones, in a pattern defined by the user. In order to carry out this assembly, manipulable objects are fed to the robotic arm NED2 by a conveyor. The robotic arm NED2 then identifies the parts before picking them up. If the manipulable object picked up is not required for the pattern, it will be deposited it in the waste area (rejects), otherwise it will be placed it in the ALPHA or BETA zones, following the given pattern.

Lab Contents
Chapter 1: Pick and place
- Define reference points and points of interest in the robotic arm NED2 workspace.
- Create the sequence of movements for a pick-and-place operation.
- Perform a palletizing operation.
Chapter 2: Defining a pattern
- Create an operator input and pattern creation function.
- Determine whether a manipulable object belongs to an existing pattern.
- Trigger the corresponding action for a manipulable object according to the following cases: not belonging to a pattern, belonging to a pattern and already processed, belonging to a pattern and not processed.
Chapter 3: Vision
- Feed the manipulable object via the conveyor
- Master the results of camera object detection: shape, color and position of a manipulable object in a defined workspace.
- Pick up a manipulable object identified by the camera.
Chapter 4: Integration
- Automatically produce a pattern entered by an operator, using manipulable objects supplied by the conveyor.
Prerequisite knowledge
Python: Basic syntax + simple data and control structures + loops + simple function calls
Required components





What you'll learn
- Robotics Fundamentals – Practice the concepts of reference frames and points, associated with a tool and a base, in robotics.
- Robotics Fundamentals – Perform pick-and-place operations within a workspace using a specific tool.
- Robotics Fundamentals – Understand and master sequences of joint and linear movements.
- Robotics Fundamentals – Be able to integrate operator commands into the robot’s environment.
- Programming: Python – Deepen programming concepts by implementing lists and/or dictionaries in Python.
- Vision – Understand and control the configuration of an RGB camera in a specific environment.
- Vision – Practice object detection using the Niryo vision kit.
Course content
About the Author
Enrolment options
Bundle Discovery : Order Assembly and Preparation
- Length: 6h
- Content Type: Lab
- Programming: Python
- Equipment: Bundle discovery
Scenario
We want to carry out an assembly that involves arranging specific manipulable objects (shape and color) in the ALPHA and BETA zones, in a pattern defined by the user. In order to carry out this assembly, manipulable objects are fed to the robotic arm NED2 by a conveyor. The robotic arm NED2 then identifies the parts before picking them up. If the manipulable object picked up is not required for the pattern, it will be deposited it in the waste area (rejects), otherwise it will be placed it in the ALPHA or BETA zones, following the given pattern.
Lab Contents
Chapter 1: Pick and place
- Define reference points and points of interest in the robotic arm NED2 workspace.
- Create the sequence of movements for a pick-and-place operation.
- Perform a palletizing operation.
Chapter 2: Defining a pattern
- Create an operator input and pattern creation function.
- Determine whether a manipulable object belongs to an existing pattern.
- Trigger the corresponding action for a manipulable object according to the following cases: not belonging to a pattern, belonging to a pattern and already processed, belonging to a pattern and not processed.
Chapter 3: Vision
- Feed the manipulable object via the conveyor
- Master the results of camera object detection: shape, color and position of a manipulable object in a defined workspace.
- Pick up a manipulable object identified by the camera.
Chapter 4: Integration
- Automatically produce a pattern entered by an operator, using manipulable objects supplied by the conveyor.
Prerequisite knowledge
Python: Basic syntax + simple data and control structures + loops + simple function calls
Required components
- Enrolled students: 162
- Length: 6h
- Content Type: Lab
- Programming: Python
- Equipment: Bundle discovery
This course includes
Resources