About the course
Scenario
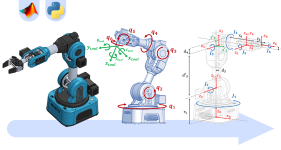
Geometric modeling of an articulated robot establishes a crucial connection between joint coordinates and Cartesian coordinates. This relationship is fundamental when it comes to controlling the position and orientation of a tool, especially for assigning motor joint angle commands to position an object in space, such as in pick-and-place operations. The objective of this lab is to provide comprehensive training on the forward geometric modeling of manipulator robots, with particular focus on the Niryo NED2 robot, which has six degrees of freedom.
We will adopt the Khalil and Kleinfinger method, known for its ability to provide a homogeneous and efficient description with a reduced number of parameters, suitable for both simple mechanical structures and more complex configurations. The course will detail, step by step, how to use this notation to determine the Cartesian coordinates of the robot’s tool endpoint, whether it is the sixth axis or the center of the gripper equipped with a specific tool.
During interactive practical sessions, students will be guided through the application of key geometric transformations to achieve both precise and simplified modeling. They will explore how to interpret coordinate systems, use transformation matrices, and understand the interactions between the various components of the robot. By mastering these skills, students will be able to efficiently model the movement and control of serial-type manipulator robots, paving the way for advanced applications in robotics.
Laboratory contents
Chapter 1: Geometric Modeling of a NED2 Robot
- Identification of Joints via the NiryoStudio Software
- Visualization of Frames in 3D Modeling Software
- Plotting the Kinematic Chain of the Robot in HOME Position
- Placement of Frames According to Methodology Conventions
- Identification of Geometric Parameters
Chapter 2: Direct Geometric Model of the NED2 Robot
- Writing the Transformation Matrix for Each Joint
- Calculation of the Global Matrix
- Extraction of Positions and Orientations
- Python Code to Plot the Workspace of the Niryo NED2 Robot
- Comparison of Results
Required equipment
 Ned 2
Ned 2![]() NiryoStudio
NiryoStudio
Prerequisite knowledge
- Python/Matlab: Basic syntax + simple data structures and control structures + simple function calls
- Math: Matrix calculations – Ability to multiply matrices
- Robotics: Ability to perform positioning and parameterization following the modified Denavit-Hartenberg convention, express a transformation matrix, and calculate the direct geometric model of a robot.
Setup
- Place the NED2 robotic arm on a table. The NED2 robotic arm should have a clear perimeter of obstacles approximately 60 centimeters in radius.
- Connect the NED2 robotic arm to the safety box of the NED robotic arm.
- Connect the safety box of the NED2 robotic arm to the power supply of the NED2 robotic arm.
- Plug the power supply of the NED2 robotic arm into the electrical network.
- Connect the NED2 robotic arm to NiryoStudio.
Course content
About the Author
Othman LAKHAL obtained his Master’s and Doctorate degrees in automation and robotics from the University of Lille, in Villeneuve-d’Ascq, France, in August 2013 and November 2018, respectively. He is currently a lecturer in robotics and automation at the CRIStAL laboratory, University of Lille. His research focuses on the modeling, identification, and control of hyper-redundant and heterogeneous systems.
Enrolment options
Complete Direct Geometric Model of the Ned2
- Length: 5h
- Content Type: Lab
- Programming: Python
- Equipment: Bundle STEM
Scenario
Geometric modeling of an articulated robot establishes a crucial connection between joint coordinates and Cartesian coordinates. This relationship is fundamental when it comes to controlling the position and orientation of a tool, especially for assigning motor joint angle commands to position an object in space, such as in pick-and-place operations. The objective of this lab is to provide comprehensive training on the forward geometric modeling of manipulator robots, with particular focus on the Niryo NED2 robot, which has six degrees of freedom.
We will adopt the Khalil and Kleinfinger method, known for its ability to provide a homogeneous and efficient description with a reduced number of parameters, suitable for both simple mechanical structures and more complex configurations. The course will detail, step by step, how to use this notation to determine the Cartesian coordinates of the robot’s tool endpoint, whether it is the sixth axis or the center of the gripper equipped with a specific tool.
During interactive practical sessions, students will be guided through the application of key geometric transformations to achieve both precise and simplified modeling. They will explore how to interpret coordinate systems, use transformation matrices, and understand the interactions between the various components of the robot. By mastering these skills, students will be able to efficiently model the movement and control of serial-type manipulator robots, paving the way for advanced applications in robotics.
Laboratory contents
Chapter 1: Geometric Modeling of a NED2 Robot
- Identification of Joints via the NiryoStudio Software
- Visualization of Frames in 3D Modeling Software
- Plotting the Kinematic Chain of the Robot in HOME Position
- Placement of Frames According to Methodology Conventions
- Identification of Geometric Parameters
Chapter 2: Direct Geometric Model of the NED2 Robot
- Writing the Transformation Matrix for Each Joint
- Calculation of the Global Matrix
- Extraction of Positions and Orientations
- Python Code to Plot the Workspace of the Niryo NED2 Robot
- Comparison of Results
Required equipment
Ned 2![]() NiryoStudio
NiryoStudio
Prerequisite knowledge
- Python/Matlab: Basic syntax + simple data structures and control structures + simple function calls
- Math: Matrix calculations – Ability to multiply matrices
- Robotics: Ability to perform positioning and parameterization following the modified Denavit-Hartenberg convention, express a transformation matrix, and calculate the direct geometric model of a robot.
Setup
- Place the NED2 robotic arm on a table. The NED2 robotic arm should have a clear perimeter of obstacles approximately 60 centimeters in radius.
- Connect the NED2 robotic arm to the safety box of the NED robotic arm.
- Connect the safety box of the NED2 robotic arm to the power supply of the NED2 robotic arm.
- Plug the power supply of the NED2 robotic arm into the electrical network.
- Connect the NED2 robotic arm to NiryoStudio.
- Enrolled students: 161
- Length: 5h
- Content Type: Lab
- Programming: Python
- Equipment: Bundle STEM
This course includes
Resources