Presenter's guideline - WS2 : Conveyor & Sensor Integration
🎯Expand the line by adding motion control and logic. Participants will integrate the conveyor and IR sensor so the robot can move objects automatically and react to sensor input.
⏱️2 hours
Step 10: Pick and Place from Conveyor to Slope
Action:
-
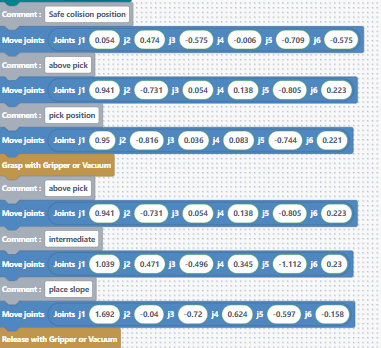
Record new positions:
-
Intermediate position collision safe
-
Above object at end stopper
-
On the object (grasp)
-
Grasp action
-
Above position again
-
Intermediate safe position
-
Above slope placement position (on top of the slope)
-
Release action
Speaker notes:
“Now we complete the program by picking the object from the end of the conveyor and placing it back on the slope, just like we did for the first pick.”
“Please note that it is always important to use intermediate positions to avoid collisions with other equipment.”
“We save the positions, add the Grasp and Release actions, and that’s it — our full loop is complete.”