Presenter's guideline - WS0 : From simulation to Real world
Completion requirements
🎯Build a complete vision pick and place inside the simulation then Participants transfer the code to the real robot.
⏱️3 hours
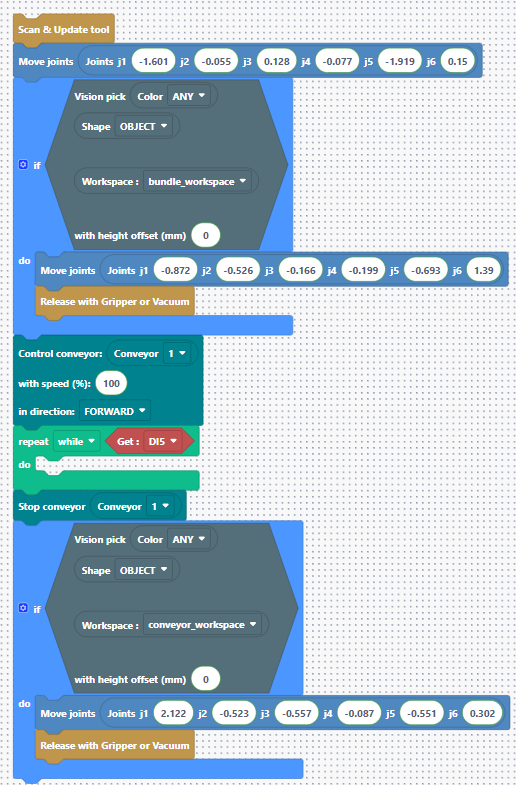
Step 4: Create Your First Program in Simulation
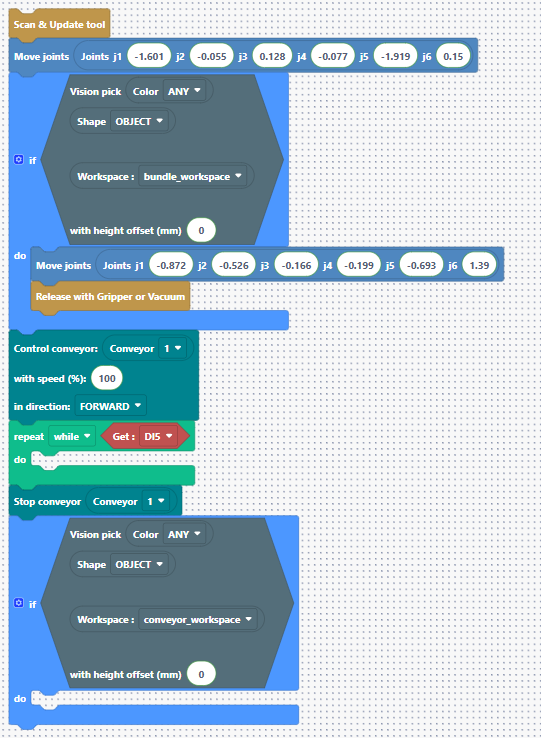
Vision Pick on the Conveyor Workspace
-
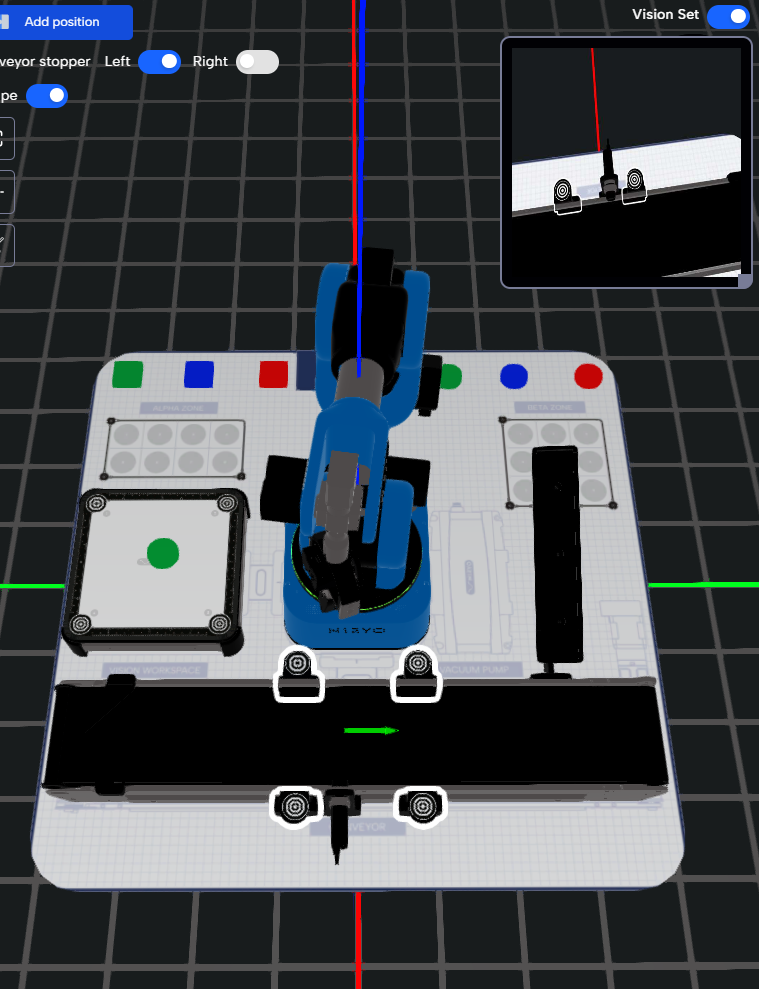
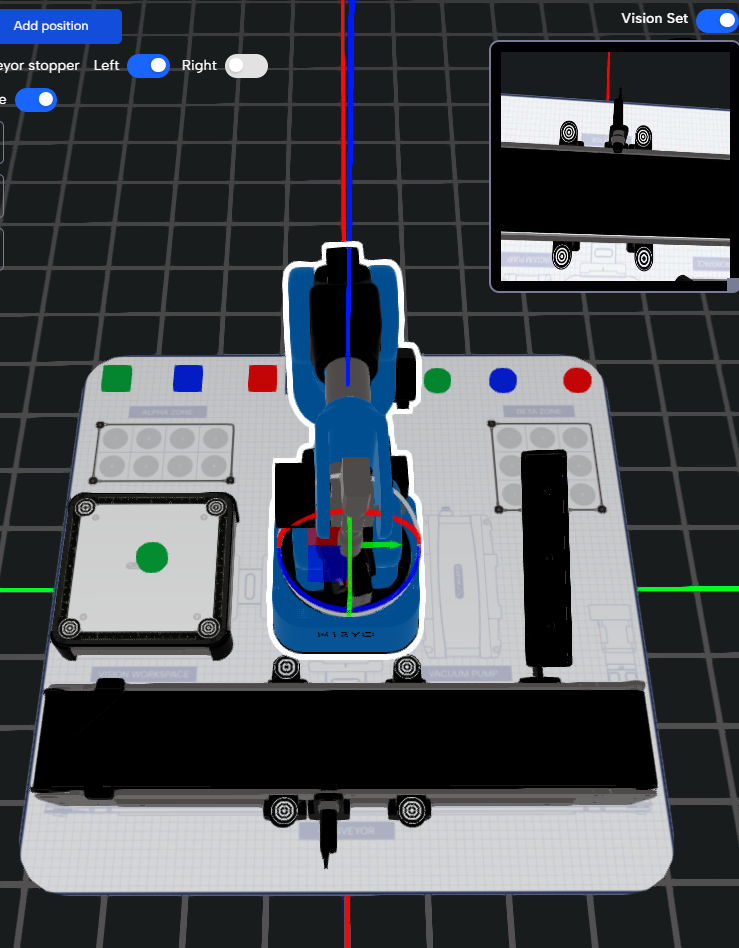
Move the robot to the correct observation pose for the conveyor workspace.
-
Warning: the conveyor workspace is movable, so the double-click may not be accurate.
-
Adjust the pose manually if needed.
-
Create a Vision Pick exactly as you did for the vision plate, but using the conveyor workspace.
-
Move the robot manually above the Beta zone frame, save this position, and add a Release with Tool block.