Presenter's guideline - WS4 : Variables management
Completion requirements
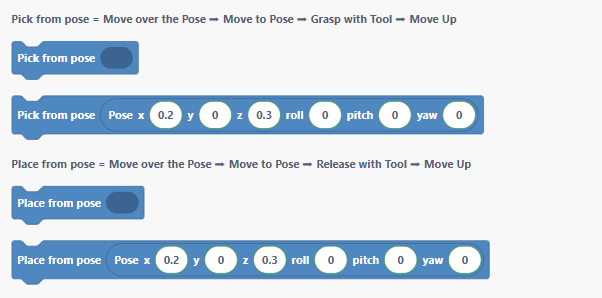
Step 7: Pick and Place Block Reference
Action:
- Show the Pick from pose and Place from pose blocks.
- Explain the parameters: X, Y, Z (meters) and Roll, Pitch, Yaw (radians).
Speaker Notes:
"Before we build the full program, remember how these blocks work. Pick from pose moves the robot over the object, grabs it, and moves up. Place from pose does the opposite. In our next step, we won't type a number for the Y coordinate; we will use our variable 'y' instead."