SCHRITT 5: Erste Bewegungen mit Ihrem Roboter
Allgemeiner Überblick:
Hier ist ein Video, wie man
- den Roboter mit dem Direktbewegungs-Modus bewegt
- Ihr erstes Programm erstellt, um den Roboter mit Blockly zu bewegen
🔎Tieferes Verständnis – Direktbewegung
Die Registerkarte für Direktbewegung ermöglicht es Ihnen, den Roboter einfach zu steuern und Zustandsinformationen abzurufen. Sie können in diesem Bereich auch Positionskonfigurationen erstellen und speichern.
Jog-Steuerung
Die Funktion Jog-Steuerung ermöglicht es Ihnen, den Roboter in Echtzeit zu bewegen, entweder durch das individuelle Steuern seiner Gelenke oder durch Bewegungen entlang einer bestimmten Achse.
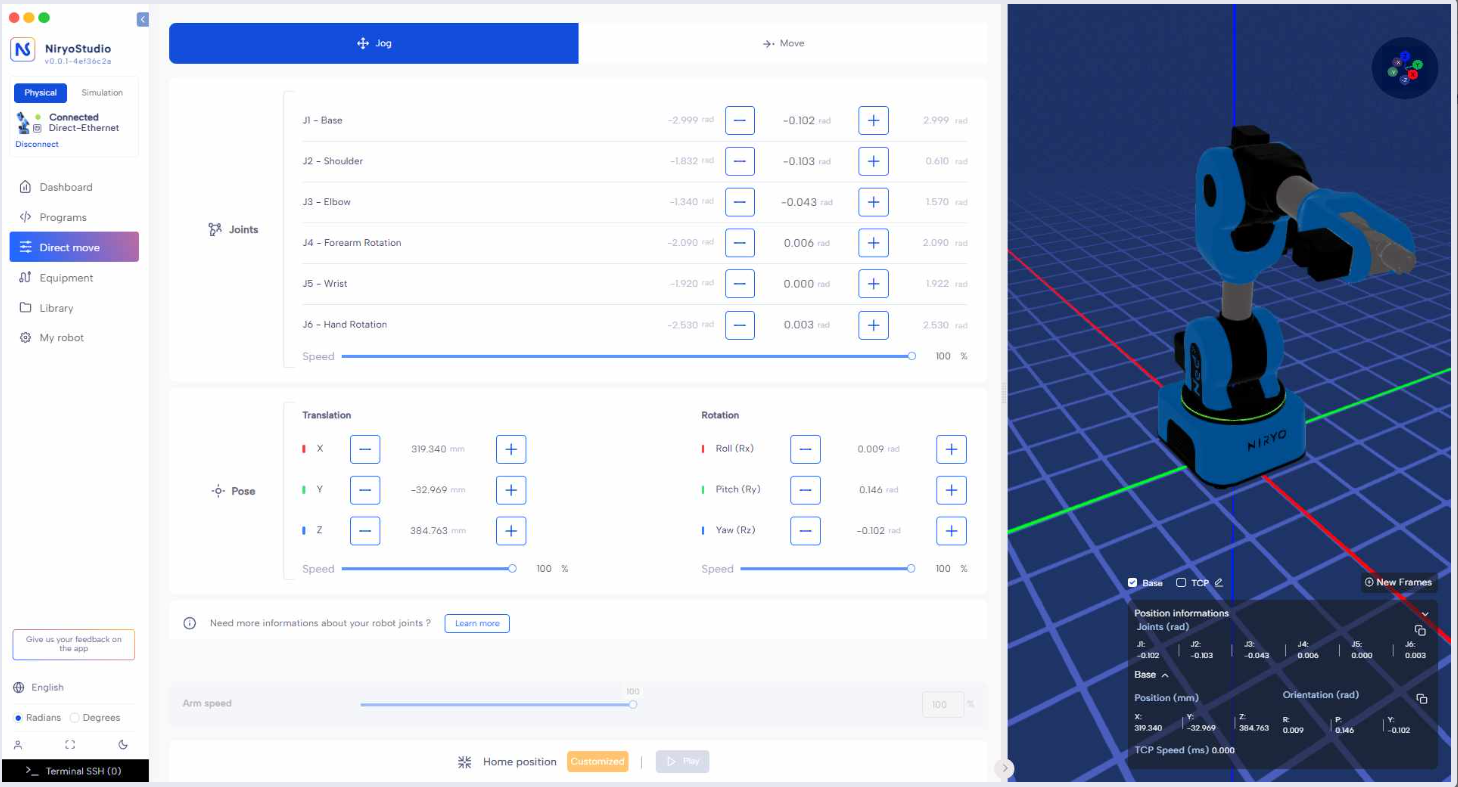
- Um die Bewegung zu starten, halten Sie die +- bzw. –-Taste mit der linken Maustaste gedrückt.
- Um die Bewegung zu stoppen, lassen Sie die Maustaste los.
- Sie können die Bewegungsgeschwindigkeit des Roboters über den Schieberegler in dem Abschnitt einstellen, der der gewünschten Bewegungsart (Gelenke oder Pose) entspricht.
Die Einstellung der Armgeschwindigkeit ist in diesem Bildschirm deaktiviert. Die Bewegungsgeschwindigkeit wird ausschließlich über die Geschwindigkeitsregler jedes Abschnitts angepasst.
Bewegungssteuerung
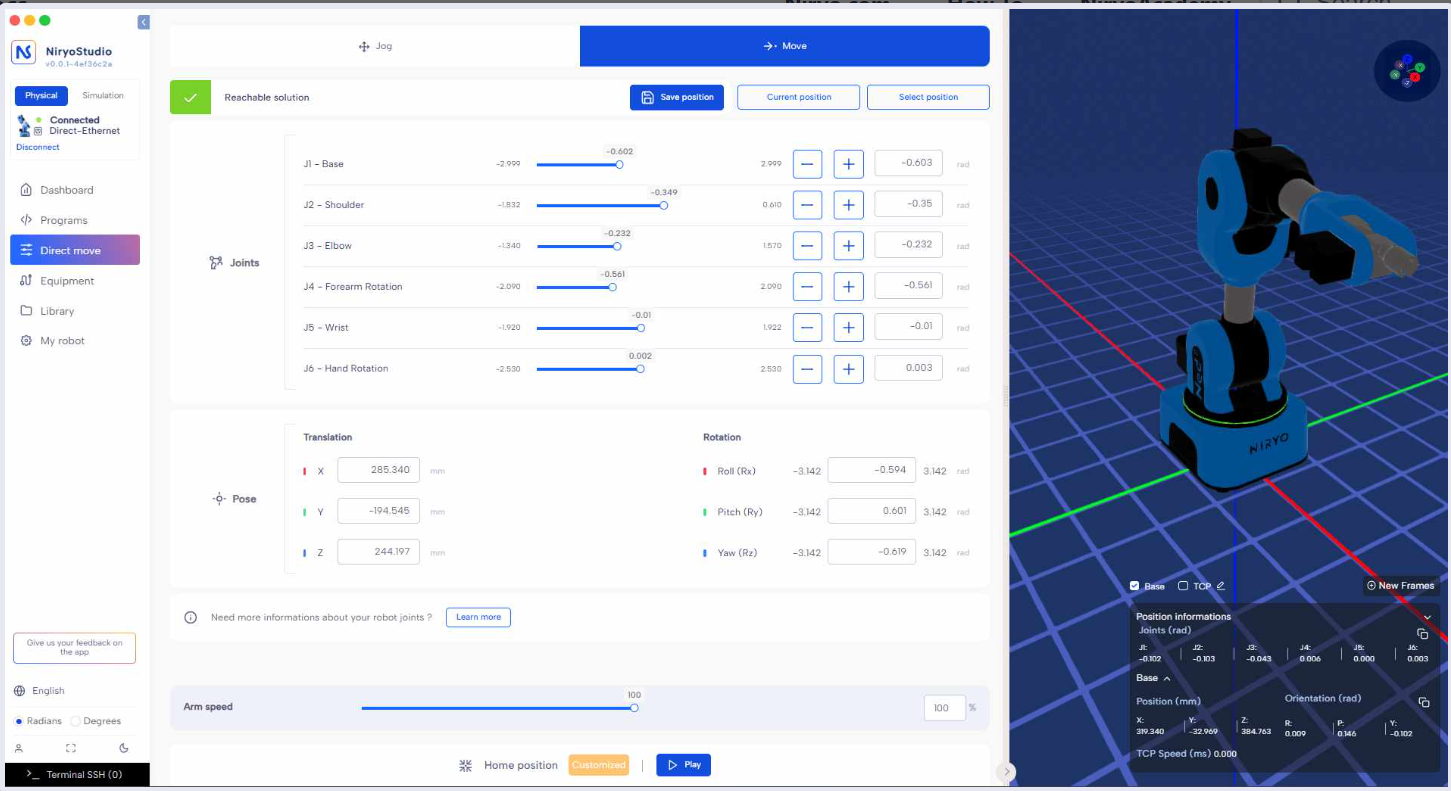
Der Bereich Bewegungssteuerung ermöglicht es Ihnen, den Roboter zu bewegen, indem Sie präzise Gelenkwerte oder Pose-Koordinaten festlegen.
Dieser Modus wird verwendet, um exakte Positionen zu definieren, die später gespeichert und erneut verwendet werden können.
Funktionsweise
Die Bewegungssteuerung erfolgt in zwei Schritten:
- Der Benutzer definiert die gewünschten Werte (entweder eine Zielpose im kartesischen Raum oder spezifische Gelenkwerte).
NiryoStudio berechnet automatisch die entsprechende Pose oder Gelenkkonfiguration und prüft, ob die Position innerhalb der Robotergrenzen erreichbar ist. Eine Meldung bestätigt, ob die Lösung erreichbar ist oder nicht. - Nach der Validierung kann der Benutzer auf die Play-Schaltfläche klicken, um die Bewegung auszuführen.
Dies stellt sicher, dass der Roboter nur Positionen anfährt, die physisch erreichbar und sicher sind.
Steuerung
- Gelenksteuerung (J1 bis J6): Legen Sie den gewünschten Winkel für jedes Gelenk des Roboters fest. Sie können den Schieberegler oder die + / – Tasten verwenden.
- Posensteuerung (Translation & Rotation): Definieren Sie die Roboterposition im kartesischen Raum durch Eingabe der Werte für:
- Translation: X, Y, Z (in Millimetern)
- Rotation: Roll (Rx), Pitch (Ry), Yaw (Rz) (in Radiant oder Grad)
Position Laden / Speichern
- Position speichern: Sobald sich der Roboter in der gewünschten Konfiguration befindet, klicken Sie auf „Position speichern“, um sie in Ihrer Bibliothek abzulegen.
- Aktuelle Position: Kopiert die aktuelle reale Position des Roboters und aktualisiert sowohl die Gelenkwerte als auch die Posewerte in der Bewegungsoberfläche.
- Position auswählen: Wählen Sie eine zuvor gespeicherte Position und bewegen Sie den Roboter dorthin.
Geschwindigkeitssteuerung
Der Armspeed-Schieberegler am unteren Bildschirmrand steuert die Gesamtgeschwindigkeit des Roboters bei Bewegungen in diesem Modus.
FreeMove
Sie können den Roboter frei bewegen, indem Sie die FREEMOTION-Taste am Endeffektor des Roboters gedrückt halten.
🚀 Schnellstart
Sie können das Blockly-Programm auch direkt hier herunterladen.