PASO 5: Primeros movimientos con su robot
Visión general:
Aquí tiene un vídeo sobre cómo:
- Mover el robot con el modo Direct Move (Movimiento directo)
- Crear su primer programa para mover el robot con Blockly
🔎Para profundizar - Direct Move
La pestaña Direct Move le permite controlar fácilmente el robot y obtener información sobre su estado. También puede crear y guardar configuraciones de posición en esta pestaña.
Jog Control (Control por pasos)
La función Jog Control le permite mover el robot en tiempo real, ya sea controlando sus articulaciones individualmente o desplazándose a lo largo de un eje específico.
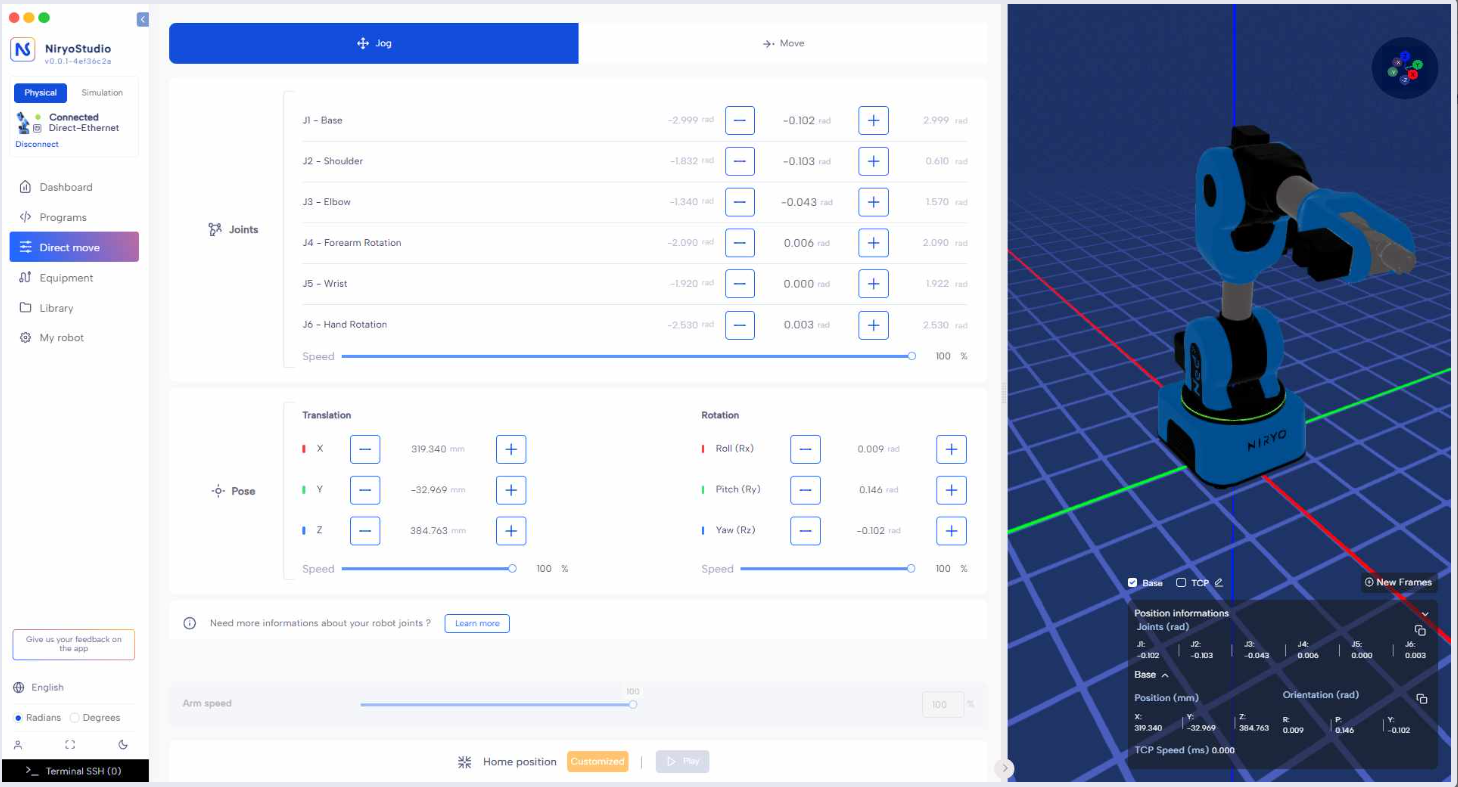
- Para iniciar el movimiento, simplemente mantenga presionado el botón + o – con el clic izquierdo del ratón.
- Para detener el movimiento, suelte el clic del ratón.
- Puede ajustar la velocidad de movimiento del robot utilizando el deslizador (slider) ubicado en la sección correspondiente al tipo de movimiento deseado (articulaciones o pose).
El ajuste de velocidad del brazo (Arm speed) está desactivado en esta pantalla. La velocidad de movimiento se ajusta exclusivamente a través de los deslizadores de velocidad de cada sección.
Move Control (Control de movimiento)
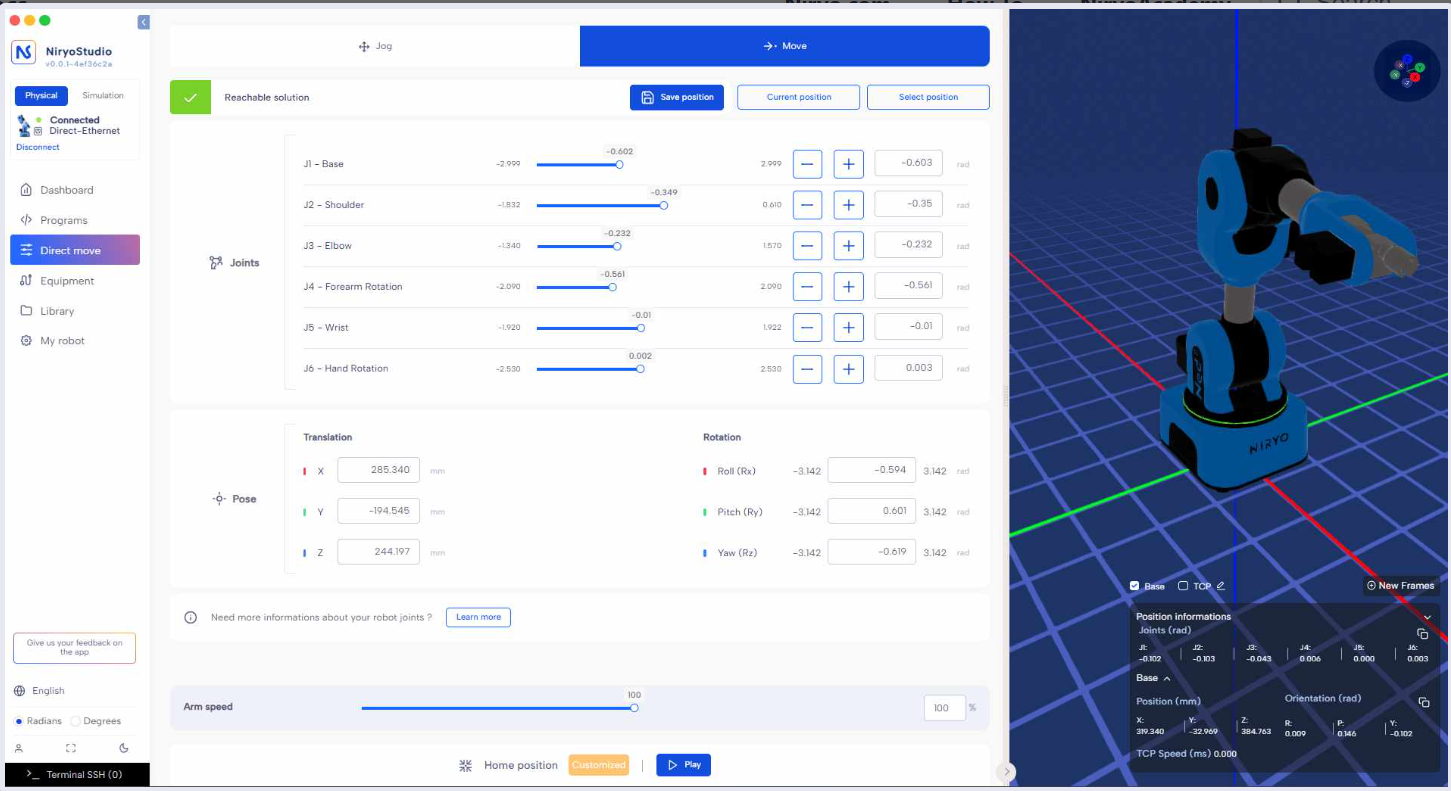
La sección Move Control le permite mover el robot estableciendo valores precisos de articulación o coordenadas de pose.
Este modo se utiliza para definir posiciones exactas que luego pueden guardarse y reutilizarse.
Cómo funciona
El Move Control opera en dos pasos:
- El usuario define los valores deseados (ya sea una pose objetivo en el espacio cartesiano o valores de articulación específicos). NiryoStudio calcula automáticamente la configuración de pose o articulación correspondiente y comprueba si la posición es alcanzable dentro de las restricciones del robot. Un mensaje confirmará si la solución es alcanzable o no.
- Una vez validado, el usuario puede hacer clic en el botón Play para ejecutar el movimiento. Esto asegura que el robot solo se mueva a posiciones que sean físicamente realizables y seguras.
Control
- Control de articulaciones (J1 a J6): Establezca el ángulo deseado para cada articulación del robot. Puede usar el deslizador o los botones + / – para ajustar los valores.
- Control de pose (Traslación y Rotación): Defina la posición del robot en el espacio cartesiano introduciendo valores para:
- Traslación: X, Y, Z (en milímetros)
- Rotación: Roll (Rx), Pitch (Ry), Yaw (Rz) (en radianes o grados)
Cargar / Guardar posición
- Guardar posición (Save Position): Una vez que el robot esté en la configuración deseada, haga clic en "Save position" para almacenarla en su biblioteca y usarla más tarde.
- Posición actual (Current Position): Copia la posición real actual del robot y actualiza tanto los valores de las articulaciones como los de la pose en la interfaz de movimiento.
- Seleccionar posición (Select Position): Elija una posición guardada previamente y mueva el robot hacia ella.
Control de velocidad
El deslizador "Arm speed" en la parte inferior de la pantalla controla la velocidad general del robot al ejecutar movimientos en este modo.
FreeMove (Movimiento libre)
Puede mover libremente el robot manteniendo presionado el botón FREEMOTION situado en el efector final del robot.
🚀 Inicio rápido
También puede descargar el programa Blockly directamente aquí.