ETAPE 5: Premiers mouvements
Vue d'ensemble générale:
Voici une vidéo qui explique comment:
- Faire bouger le robot en mode Mouvements directs
- Créer votre premier programme pour bouger le robot avec Blockly
🔎En profondeur - Déplacement Direct
L'onglet de déplacement direct vous permet de contrôler facilement le robot et d’obtenir également des informations d’état. Vous pouvez aussi créer et enregistrer des configurations de position dans cet onglet.
Jog
La fonctionnalité Jog vous permet de déplacer le robot en temps réel, soit en contrôlant individuellement ses articulations, soit en vous déplaçant le long d’un axe spécifique.
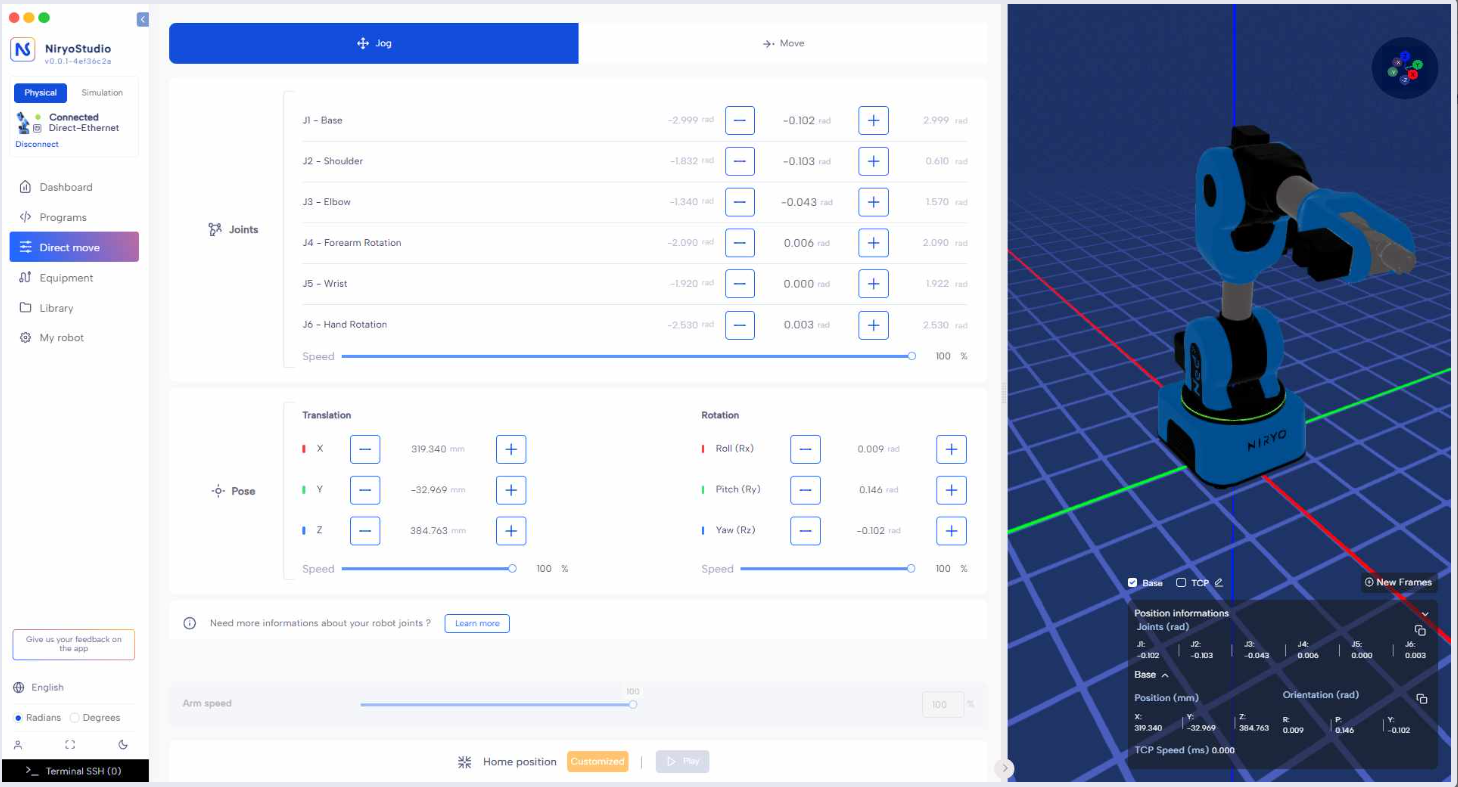
- Pour démarrer le mouvement, il suffit de maintenir le bouton + ou – avec le clic gauche de la souris.
- Pour arrêter le mouvement, relâchez le clic.
- Vous pouvez ajuster la vitesse du mouvement du robot à l’aide du slider situé dans la section correspondant au type de mouvement souhaité (articulations ou pose).
Le réglage de la vitesse du bras est désactivé sur cet écran. La vitesse du mouvement est ajustée exclusivement via les sliders de chaque section.
Contrôle en Déplacement
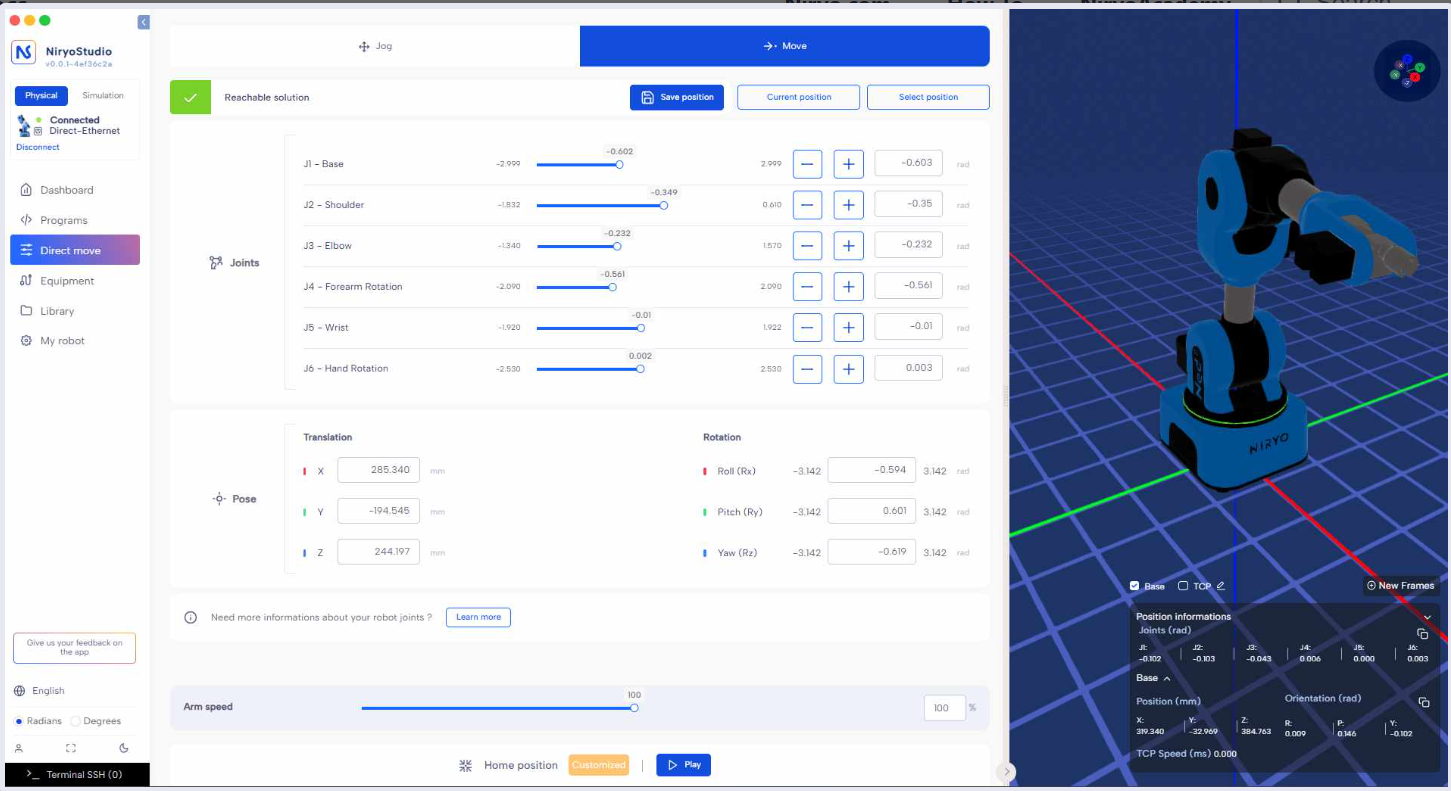
La section Contrôle en Déplacement vous permet de déplacer le robot en définissant des valeurs précises pour les articulations ou pour les coordonnées de pose.
Ce mode est utilisé pour définir des positions exactes qui peuvent ensuite être enregistrées et réutilisées.
Comment ça fonctionne
Le Contrôle en Déplacement fonctionne en deux étapes :
- L’utilisateur définit les valeurs souhaitées (une pose cible en espace cartésien ou des valeurs articulaires spécifiques).
NiryoStudio calcule automatiquement la pose ou la configuration articulaire correspondante et vérifie si la position est atteignable dans les contraintes du robot. Un message confirme si la solution est atteignable ou non. - Une fois validée, l’utilisateur peut cliquer sur le bouton Lecture pour exécuter le mouvement.
Cela garantit que le robot ne se déplace que vers des positions physiquement réalisables et sûres.
Contrôle
- Contrôle Articulaire (J1 à J6) : Définissez l’angle souhaité pour chaque articulation du robot. Vous pouvez utiliser le slider ou les boutons + / – pour ajuster les valeurs.
- Contrôle de Pose (Translation & Rotation) : Définissez la position du robot en espace cartésien en entrant les valeurs pour :
- Translation : X, Y, Z (en millimètres)
- Rotation : Roulis (Rx), Tangage (Ry), Lacet (Rz) (en radians ou degrés)
Charger / Enregistrer une Position
- Enregistrer une Position : Une fois que le robot est placé dans la configuration souhaitée, cliquez sur "Enregistrer la position" pour la stocker dans votre bibliothèque.
- Position Actuelle : Copie la position réelle actuelle du robot et met à jour les valeurs articulaires et de pose dans l’interface de Déplacement.
- Sélectionner une Position : Choisissez une position enregistrée et déplacez-y le robot.
Contrôle de la Vitesse
Le slider de vitesse du bras, en bas de l’écran, contrôle la vitesse globale du robot lors de l’exécution des mouvements dans ce mode.
FreeMove
Vous pouvez déplacer librement le robot en maintenant le bouton FREEMOTION sur l’effecteur du robot.
🚀 Démarrage rapide
Vous pouvez aussi télécharger le programme directement ici.