Vision-Set
Allgemeine Übersicht:
Hier ist ein Video darüber, wie man
- Das Vision-Kit einrichtet: die Kamera auf Ihrem Roboter montiert
- Ihren Arbeitsbereich kalibriert
- Versteht, wie man die Blockly-Blöcke verwendet, um die Kamera zu steuern
🔎Vertiefung
Finden Sie die technischen Spezifikationen unseres Vision-Kits hier.
SCHRITT 1: Auspacken
Überprüfen Sie zuerst, ob alles in der Box ist, wenn Sie Ihr Vision-Kit erhalten:
- 1 Kamera ;
- 1 Vision-Platte ;
- 1 Magnetischer Arbeitsbereich ;
- 2 Kratzer ;
- 6 manipulierbare Objekte ;
- 1 Kalibrierwerkzeug ;
- 2 Kameraschrauben ;
- 1 Inbusschlüssel 2mm
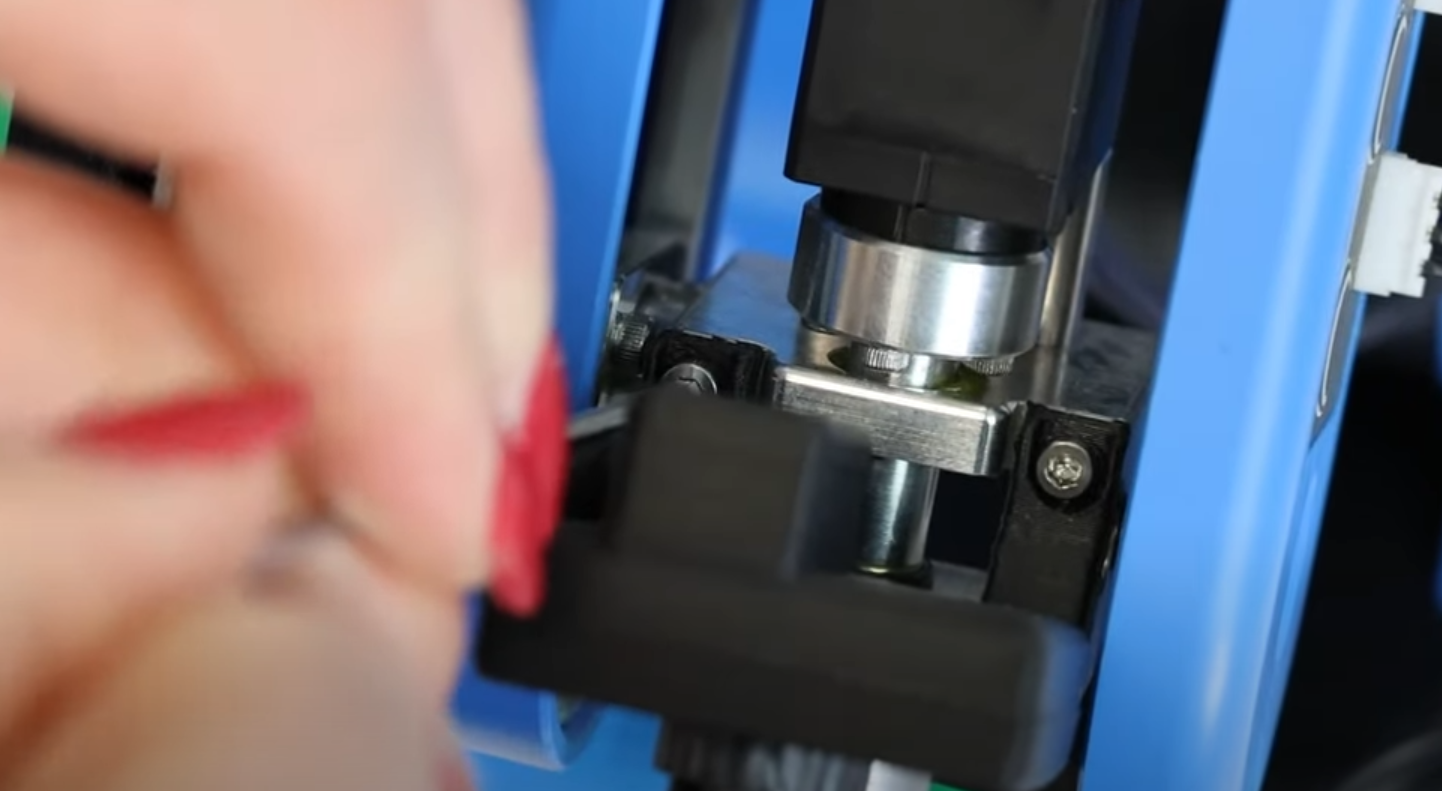
SCHRITT 2: Kamera-Installation
-
Um die Kamera am Roboter zu installieren, setzen Sie sie auf Achse 6 und sichern Sie sie durch Anziehen der beiden Schrauben an der Unterseite der Kamera (diese sind im Beutel mit der Kamera enthalten).

-
Führen Sie das Kabel durch den Greifer, positionieren Sie es zwischen dem Motor und der Aluminiumstange, um Bewegungsfreiheit zu ermöglichen

-
Verbinden Sie das USB-Kabel mit dem Roboter. Sie können es an jedem USB-Port anschließen
-
Ordnen Sie das Kabel mit dem mitgelieferten Klettband
SCHRITT 3: Arbeitsbereich erstellen
- Scannen Sie die Werkzeuge im Tab Equipment. Das Vision-Kit erscheint:
- Klicken Sie auf "New workspace"
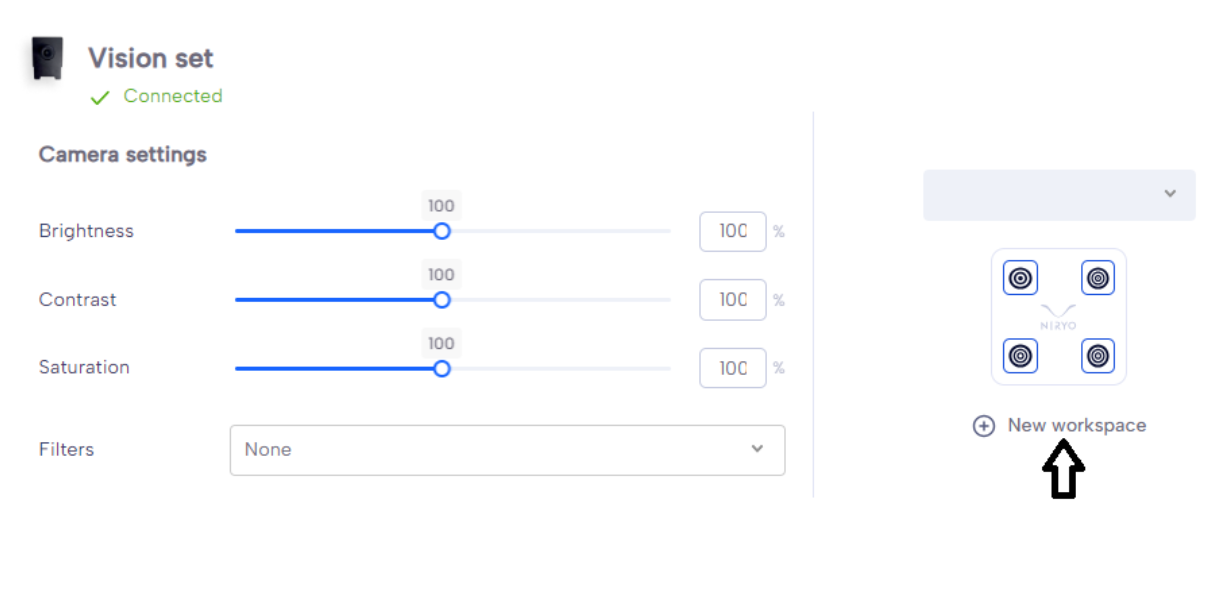
- Folgen Sie dem Prozess in NiryoStudio
Bonus: Kameroptimierung für zuverlässige „Vision Picks“
Um die Zuverlässigkeit Ihrer Vision Pick-Operationen mit dem Roboter zu gewährleisten, ist es unerlässlich, die vom Roboter wahrgenommene Bildqualität zu optimieren.
Befolgen Sie diese Schritte für eine optimale Einstellung:
Vorbereitung:
-
Platzieren Sie den Roboter über der Vision-Platte (Sichtplatte).
-
Ordnen Sie mehrere Objekte auf der Platte an und stellen Sie sicher, dass mindestens 3 Objekte jeder Farbe (Rot, Grün, Blau) enthalten sind.
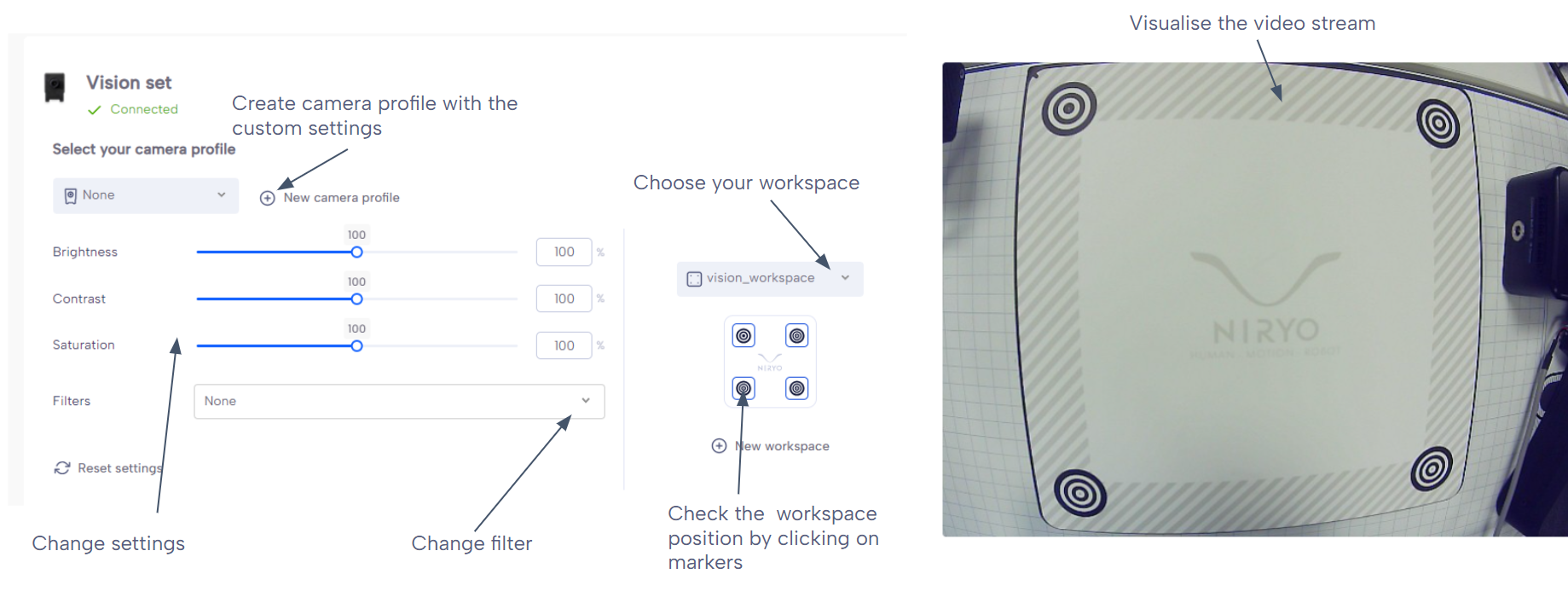
Filteraktivierung:
-
Wählen Sie in der Bildsteuerungsoberfläche die Option "All" im Dropdown-Menü der Erkennungsfilter. Dadurch können Sie visualisieren, wie sich die Änderungen auf die Erkennung aller Formen und Farben auswirken.
Anpassung der Kameraparameter:
-
Passen Sie die Kameraparameter schrittweise an: Helligkeit, Kontrast und Sättigung.
-
Ziel ist es, das perfekte Gleichgewicht zu finden, das es der Kamera ermöglicht, die verschiedenen Objekte und ihre Formen präzise und ohne Verwirrung zu erkennen.
⚠️ Wichtiger Tipp (Beispiel): Stellen Sie sicher, dass ein quadratisches Objekt nicht zusammen mit seinem Schatten erkannt wird. Ein zu stark ausgeprägter Schatten kann die Erkennung verzerren und das System irreführen, sodass es die resultierende Silhouette möglicherweise mit einer anderen Form (wie einem Kreis) verwechselt. Die Anpassung von Kontrast und Helligkeit ist hier oft entscheidend.
SCHRITT 4: Verwendung des Vision-Kits im Programm
SCHRITT 4: Beginnen Sie mit der Verwendung des Vision-Kits in Ihrem Programm
Dies sind die Blöcke, die notwendig sind, um Ihre Werkzeuge zu verwenden:
Farbwert
Ermöglicht die Auswahl einer Farbe aus der Liste der verfügbaren Farben. Diese Farbe wird im Vision Pick-Block und im Block „Erkannt“ verwendet.

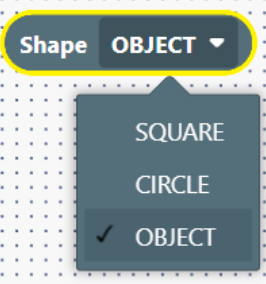
Form
Ermöglicht die Auswahl einer Form aus der Liste der verfügbaren Formen. Die ausgewählte Form wird im Vision Pick-Block und im Block „Erkannt“ verwendet.
Arbeitsbereichswert
Ermöglicht die Auswahl eines Arbeitsbereichs aus der Liste der definierten Arbeitsbereiche.
Vision Pick
Dieser Block lässt den Roboter ein Objekt aufnehmen, das mit dem Farb-Block und dem Form-Block übereinstimmt.
Der Aufnahmeprozess ist:
- Greifer öffnen
- Über das Objekt fahren (5 cm)
- Nach unten fahren
- Greifer schließen
- Zurück zu Schritt 2.
Die Aufnahme erfolgt im ausgewählten Arbeitsbereich (default_workspace im Beispiel).
Der Höhenversatz ist die Höhe, auf die sich das Endeffektor absenkt, um das Objekt aufzunehmen, basierend auf der Höhe des Arbeitsbereichs.
Beispiele für den Höhenversatz:
- Mit der Vakuumpumpe können Sie die Höhe des Objekts verwenden.
- Mit dem Standardgreifer kann es die halbe Höhe des Objekts sein, um es in der Mitte zu greifen.
Dieser Block wirkt wie eine Bedingung und gibt daher einen booleschen Wert zurück.

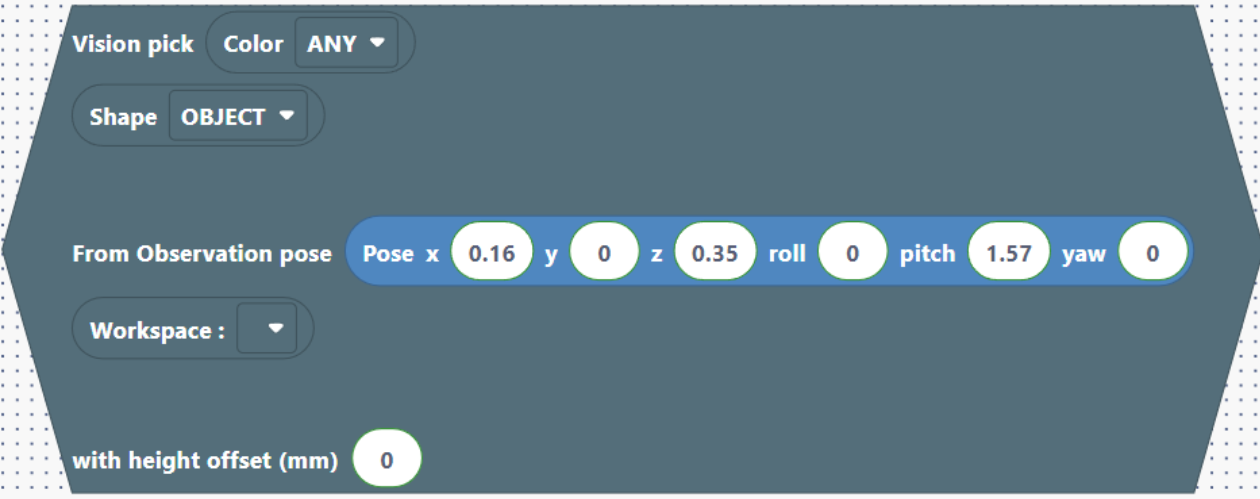
Vision Pick aus einer Pose-Sequenz
Entspricht einer Bewegung zur Beobachtungs-Pose, gefolgt von einem Vision Pick.
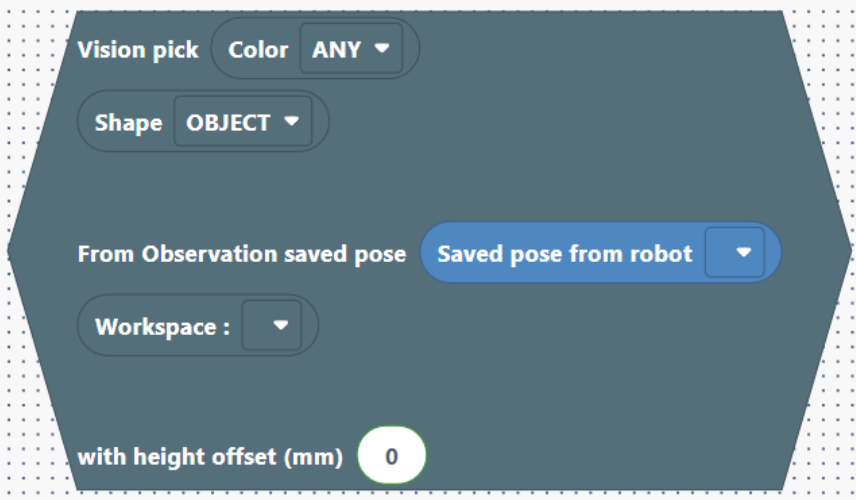
Vision Pick aus gespeicherter Pose-Sequenz
Entspricht einer Bewegung zur Beobachtungs-Pose, gefolgt von einem Vision Pick.
Bedingung: Objekt erkannt
Zeigt an, ob ein Objekt, das dem Farb-Block und dem Form-Block entspricht, im Arbeitsbereich vorhanden ist.
Dieser Block gibt einen booleschen Wert zurück.

💡Schnellstart
Sie können auch das Blockly-Programm hier herunterladen: