El kit de visión
Visión general:
Aquí tiene un vídeo sobre cómo:
- Configurar el kit de visión: montar la cámara en la parte superior del robot
- Calibrar su espacio de trabajo
- Comprender cómo utilizar los bloques de Blockly para controlar la cámara
🔎Para profundizar
Encuentre las especificaciones técnicas de nuestro kit de visión aquí.
PASO 1: Desembalaje
Verifique primero que tiene todo el contenido en la caja al recibir su kit de visión:
- 1 Cámara;
- 1 Placa de visión;
- 1 Espacio de trabajo magnético;
- 2 Tiras de velcro;
- 6 Objetos manipulables;
- 1 Herramienta de calibración;
- 2 Tornillos para la cámara;
- 1 Llave Allen de 2 mm
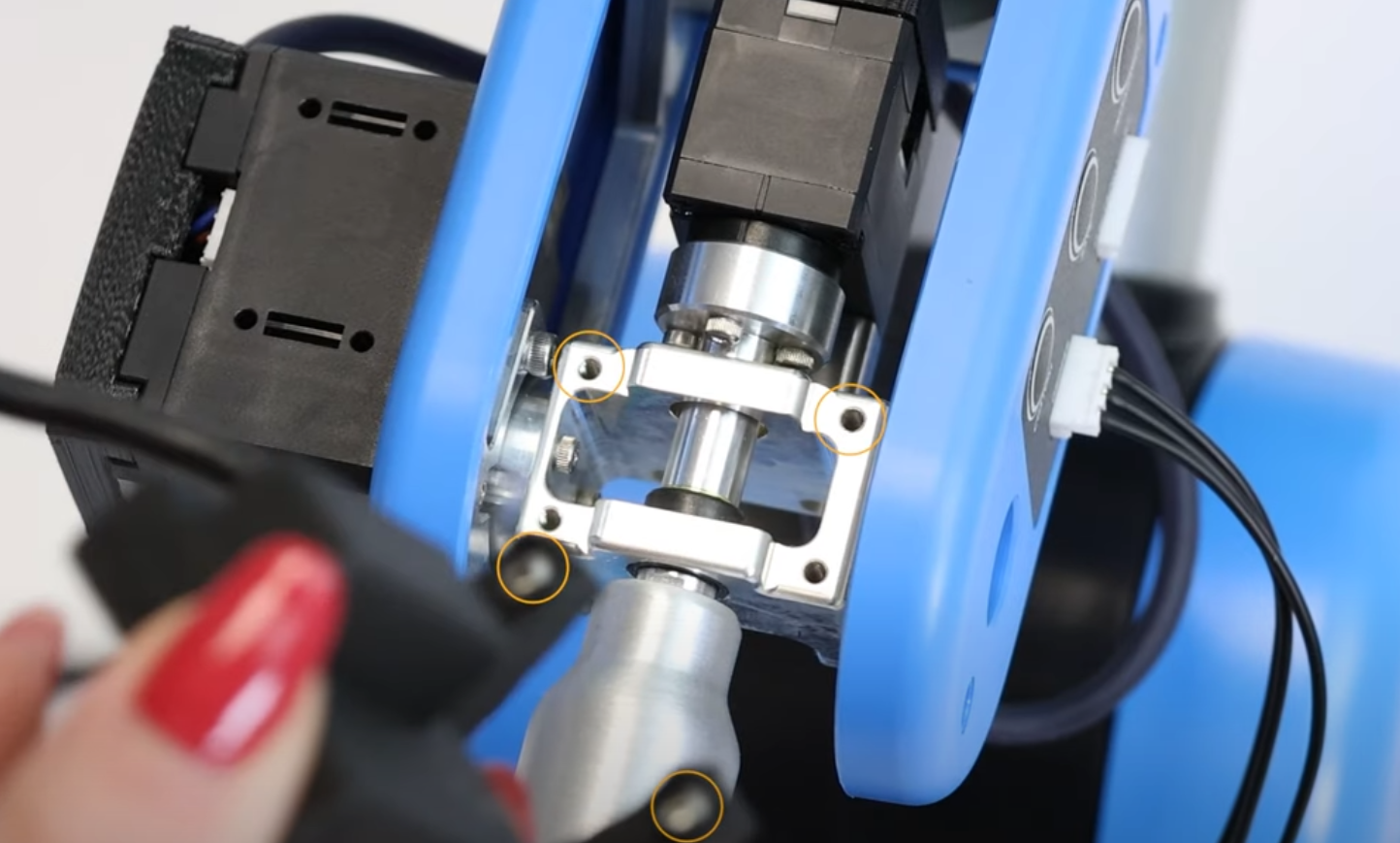
PASO 2: Instalación de la cámara
-
Para instalar la cámara en el robot, colóquela en el eje 6 y asegúrela apretando los dos tornillos en la parte inferior de la cámara (estos se incluyen en la bolsa con la cámara).

-
Pase el cable a través del efector final, posicionándolo entre el motor y el soporte de aluminio, para permitir la libertad de movimiento

-
Conecte el cable USB al robot. Puede conectarlo a cualquier puerto USB.
-
Organice el cable con el velcro proporcionado.
PASO 3: Creación del espacio de trabajo
- Escanee las herramientas en la pestaña Equipment (Equipamiento). Aparecerá el kit de visión (Vision Set):
- Haga clic en "New workspace" (Nuevo espacio de trabajo)
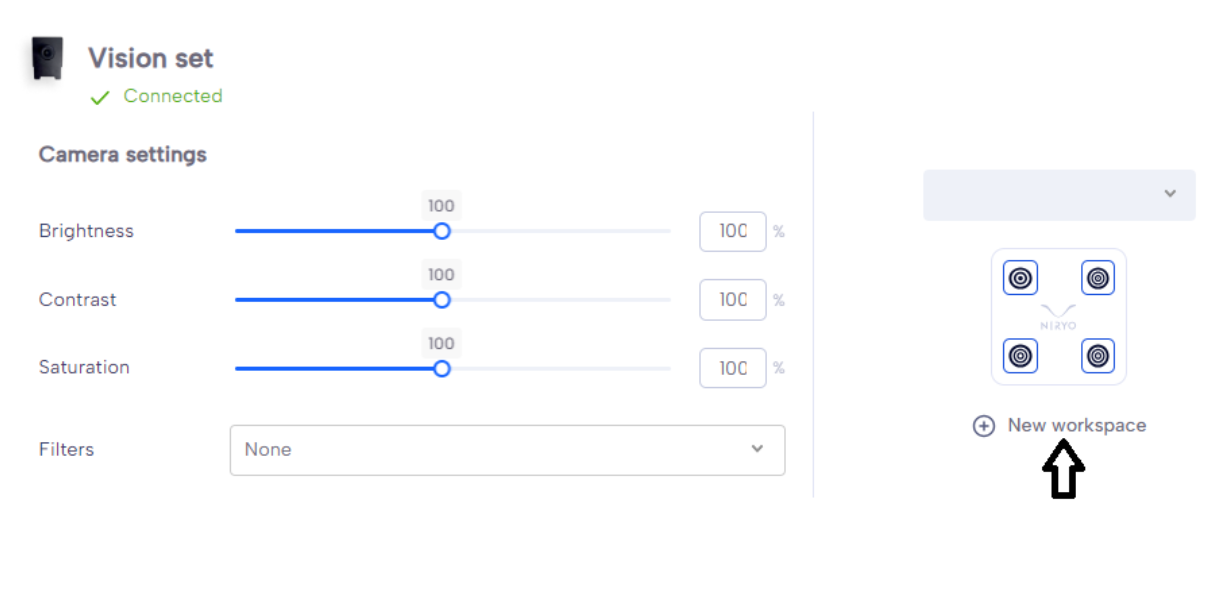
- Siga el proceso en NiryoStudio.
Bonus: Optimización de la cámara para "Vision Picks" robustos
Para asegurar la fiabilidad de sus operaciones de Vision Pick (toma por visión) con el robot, es esencial optimizar la calidad de imagen percibida por la cámara.
Siga estos pasos para una configuración óptima:
Preparación:
-
Coloque el robot encima de la placa de visión.
-
Disponga varios objetos en la placa, asegurándose de incluir al menos 3 objetos de cada color (Rojo, Verde, Azul).
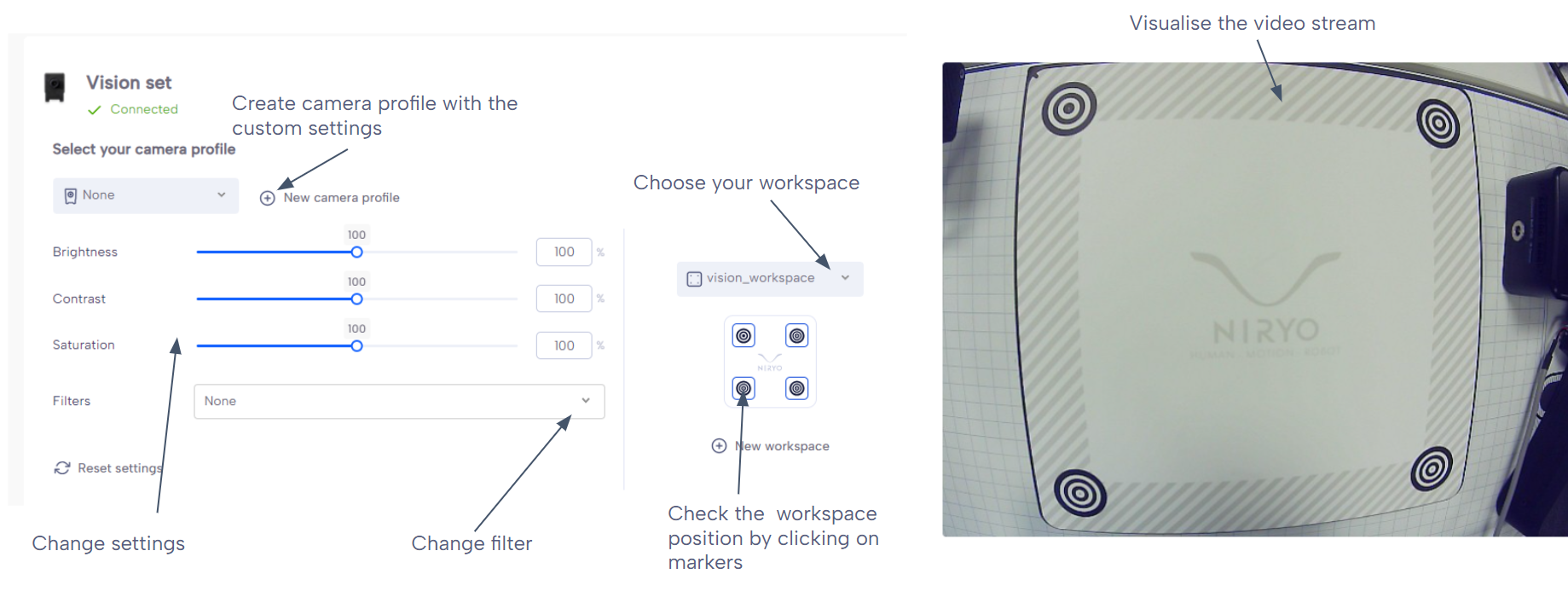
Activación de filtros:
-
En la interfaz de control de visión, seleccione la opción "All" (Todo) en el menú desplegable de filtros de detección. Esto le permite visualizar cómo afectan los cambios a la detección de todas las formas y colores.
Ajuste de parámetros de la cámara:
-
Ajuste progresivamente los parámetros de la cámara: Brillo (Brightness), Contraste (Contrast) y Saturación (Saturation).
-
El objetivo es encontrar el equilibrio perfecto que permita a la cámara detectar con precisión los diferentes objetos y sus formas, sin confusiones.
⚠️ Consejo clave (Ejemplo): Asegúrese de que un objeto cuadrado no sea detectado junto con su sombra. Una sombra demasiado pronunciada puede distorsionar la detección y confundir al sistema, haciendo que confunda la silueta resultante con otra forma (como un círculo). Ajustar el Contraste y el Brillo suele ser la clave aquí.
PASO 4: Comenzar a usar el kit de visión en su programa
Estos son los bloques necesarios para empezar a utilizar sus herramientas:
Color value (Valor de color)
Le permite elegir un color de la lista de colores disponibles. Este color se utilizará en el bloque Vision Pick y en el bloque Is detected.

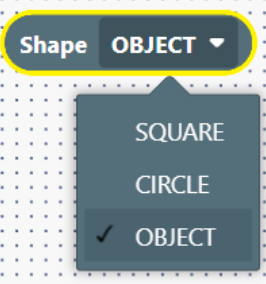
Shape (Forma)
Le permite elegir una forma de la lista de formas disponibles. La forma seleccionada se utilizará en el bloque Vision Pick y en el bloque Is detected.
Workspace value (Valor de espacio de trabajo)
Le permite elegir un espacio de trabajo de la lista de espacios de trabajo definidos.
Vision pick (Toma por visión)
Este bloque hará que el robot recoja un objeto que coincida con el bloque de Color y el bloque de Forma.
El proceso de recogida es:
- Abrir la pinza
- Situarse sobre el objeto (a 5 cm)
- Bajar
- Cerrar la pinza
- Volver al paso 2.
La toma ocurrirá en el espacio de trabajo seleccionado (default_workspace en el ejemplo).
El desplazamiento de altura (height offset) es la altura a la que el efector final llegará para tomar el objeto, basándose en la altura del espacio de trabajo.
Ejemplos de desplazamiento de altura:
- Con la bomba de vacío equipada, puede usar la altura del objeto.
- Con la pinza estándar equipada, puede ser la mitad de la altura del objeto para tomarlo por su parte media.
Este bloque actúa como una condición y, por lo tanto, devuelve un booleano.

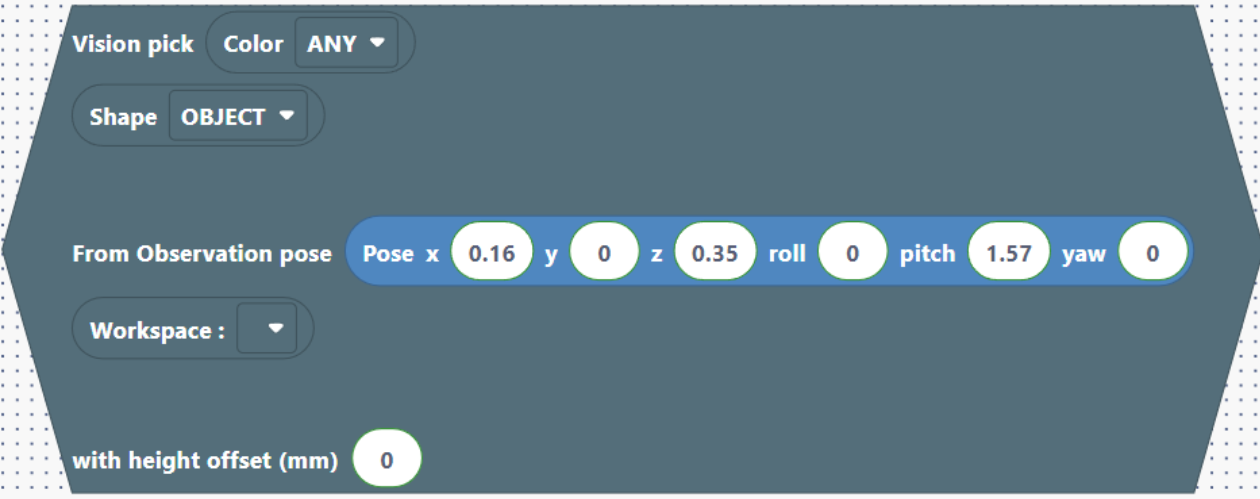
Vision pick from pose sequence (Toma por visión desde secuencia de pose)
Equivale a un movimiento (Move Pose) a la Pose de Observación seguido de una toma por visión.
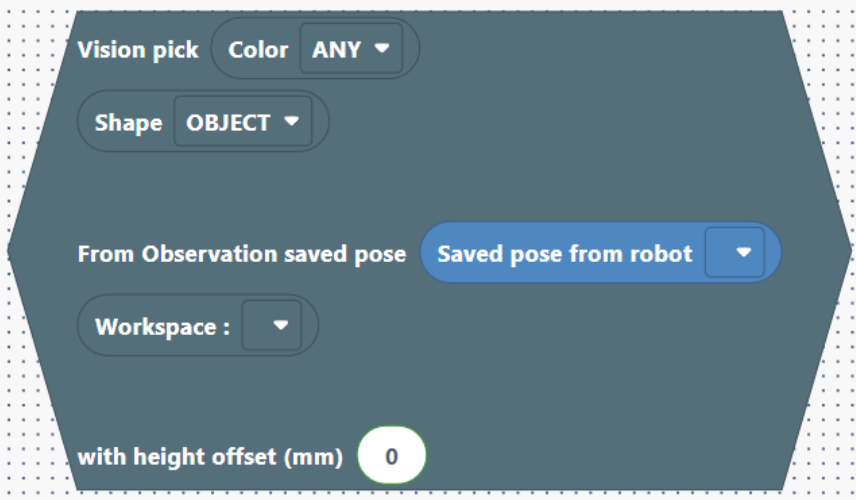
Vision pick from saved pose sequence (Toma por visión desde secuencia de pose guardada)
Equivale a un movimiento (Move Pose) a la Pose de Observación seguido de una toma por visión.
Is object detected condition (Condición de objeto detectado)
Representa si un objeto que coincide con el bloque de Color y el bloque de Forma está presente en el espacio de trabajo.
Este bloque devuelve un booleano.

💡Inicio rápido
También puede descargar el programa Blockly aquí: