Kit vision
Vue d'ensemble :
Voici une vidéo sur comment
- Configurer le kit de vision : monter la caméra sur votre robot
- Calibrer votre espace de travail
- Comprendre comment utiliser les blocs Blockly pour contrôler la caméra
🔎Approfondir
Trouvez les spécifications techniques de notre kit de vision ici.
ÉTAPE 1 : Déballage
Vérifiez d'abord que vous avez tout dans la boîte lorsque vous recevez votre kit de vision :
- 1 Caméra ;
- 1 Plaque de vision ;
- 1 Espace de travail magnétique ;
- 2 Griffes ;
- 6 Objets manipulables ;
- 1 Outil de calibration ;
- 2 Vis pour caméra ;
- 1 Clé Allen 2mm
ÉTAPE 2 : Installation de la caméra
-
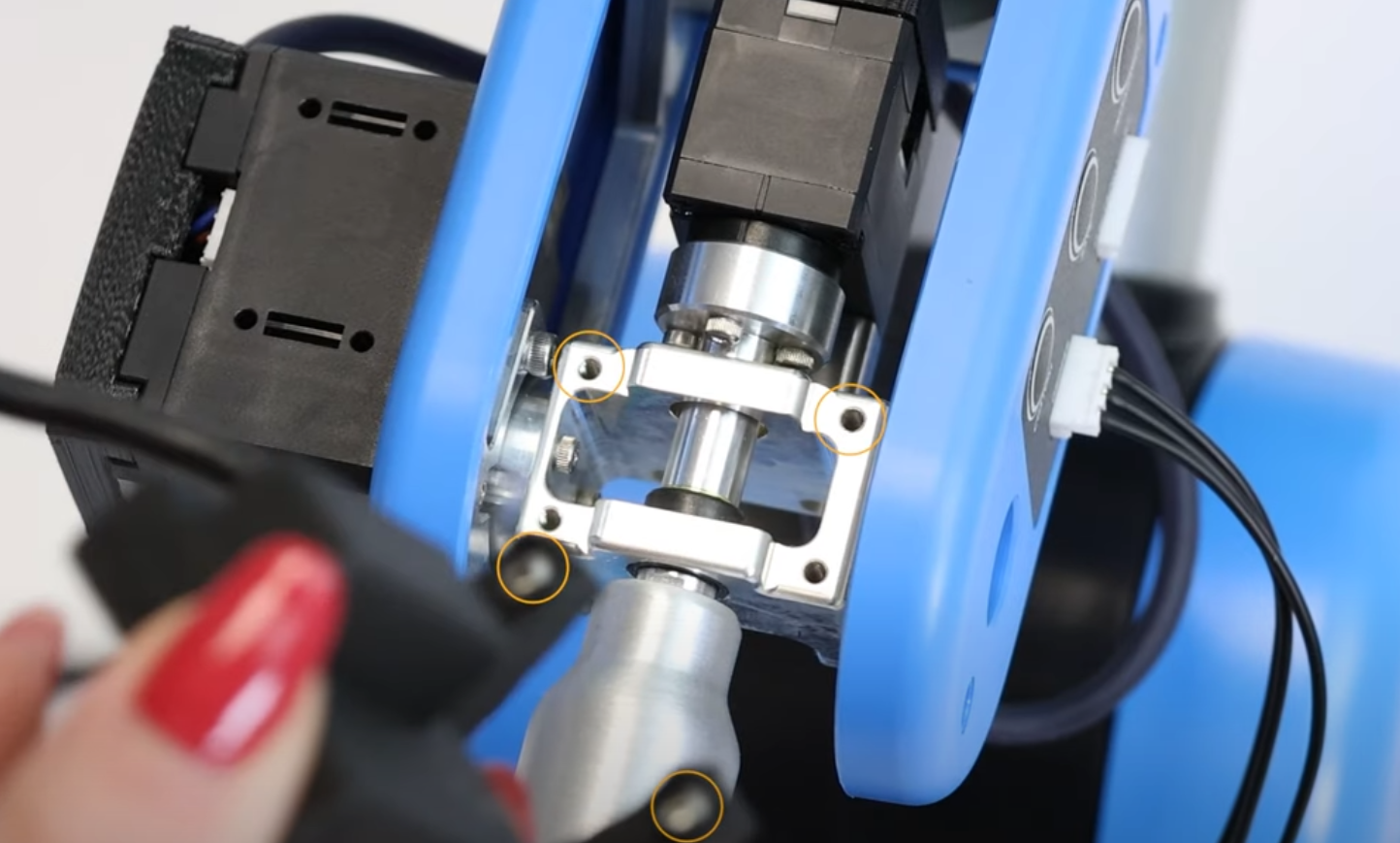
Pour installer la caméra sur le robot, placez-la sur l'axe 6 et sécurisez-la en serrant les deux vis sous la caméra (fournies dans le sac avec la caméra).
-
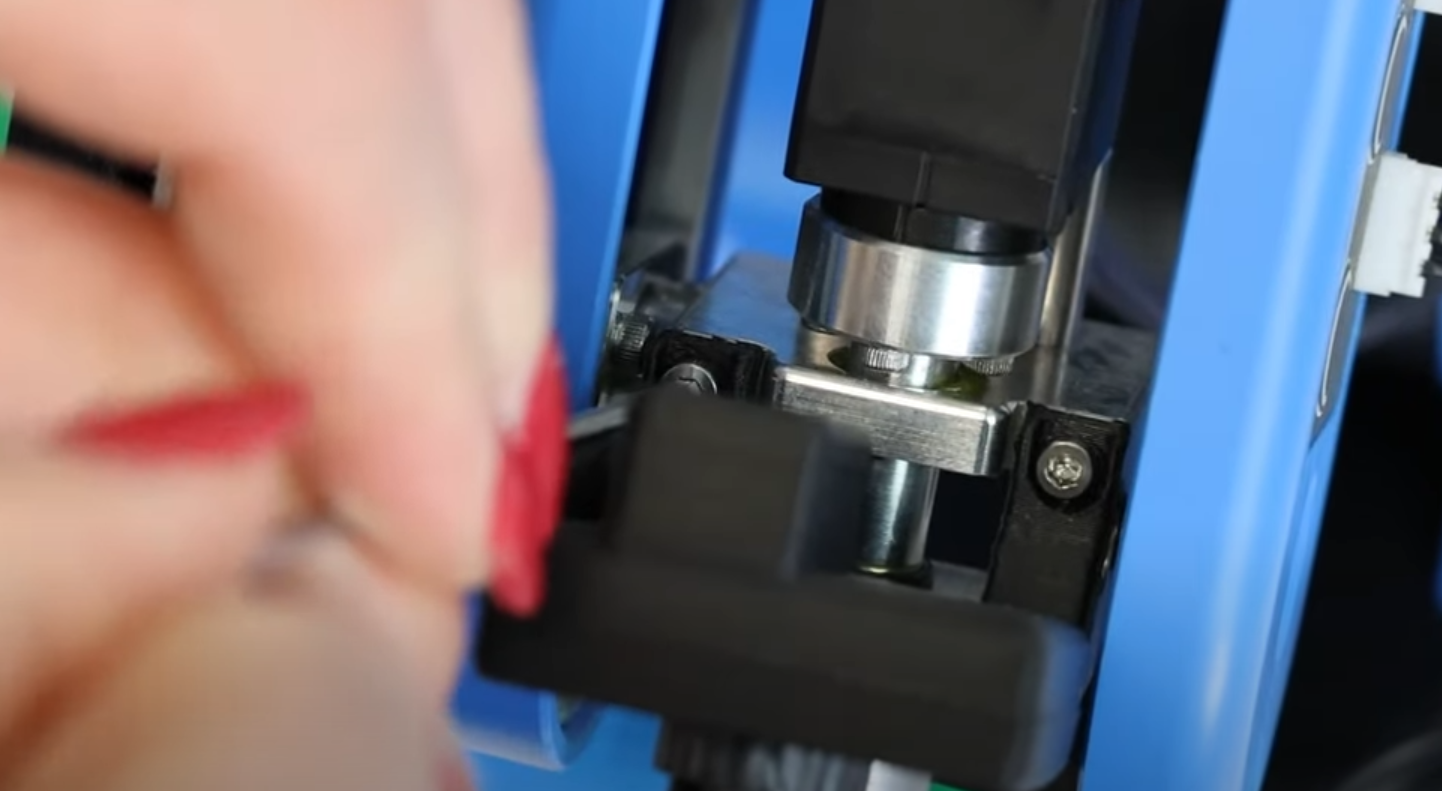
Faites passer le câble à travers le préhenseur, en le positionnant entre le moteur et la barre en aluminium, pour permettre la liberté de mouvement

-
Connectez le câble USB au robot. Vous pouvez le brancher à n'importe quel port USB
-
Organisez le câble avec le scratch fourni
ÉTAPE 3 : Création de l'espace de travail
- Scannez les outils dans l'onglet Équipement. Le kit de vision apparaîtra:
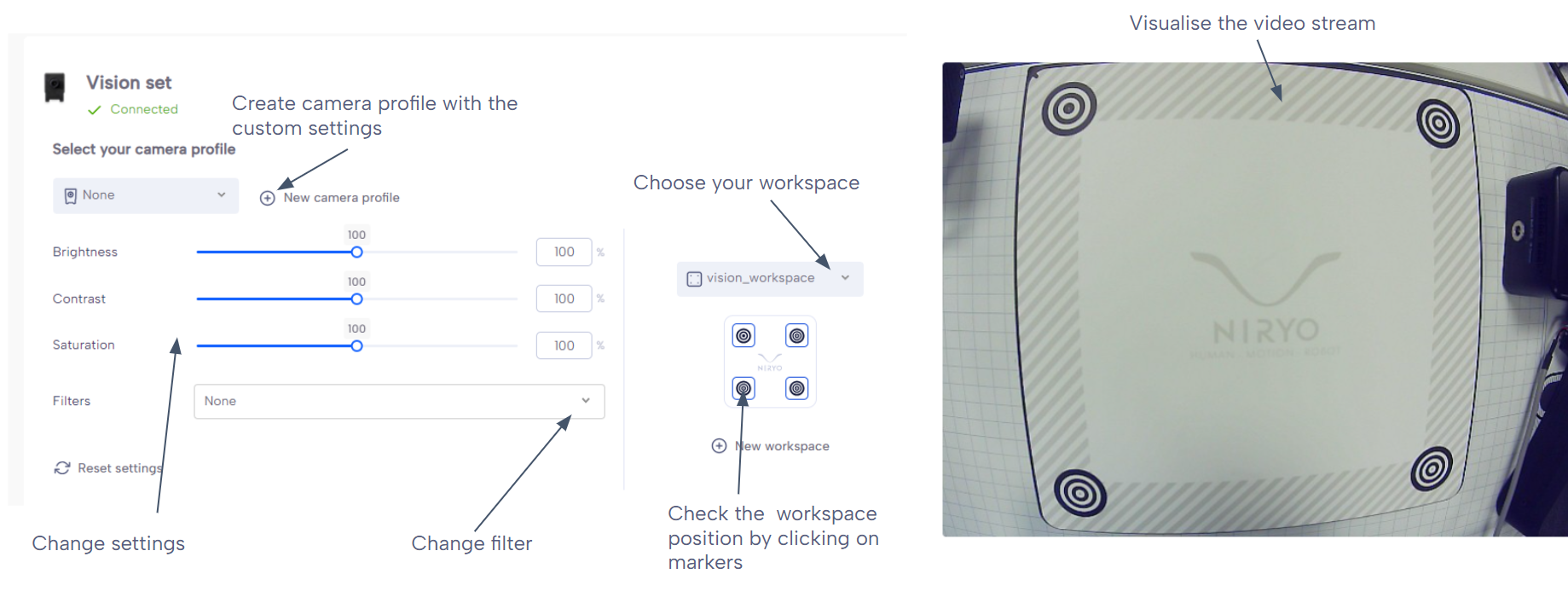
- Cliquez sur "Nouvel espace de travail"
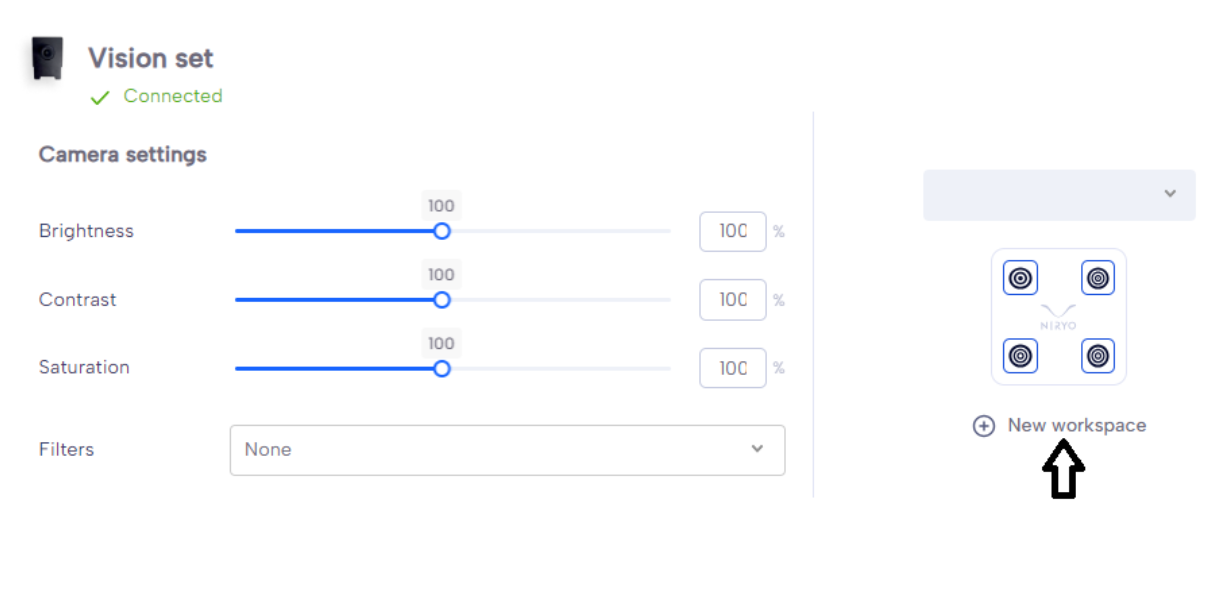
- Suivez le processus dans NiryoStudio
Bonus: Optimisation de la caméra pour des « Vision Pick » Robustes
Pour garantir la fiabilité de vos opérations de Vision Pick avec le robot, il est essentiel d'optimiser la qualité de l'image perçue par la caméra.
Suivez ces étapes pour un réglage optimal :
-
Préparation :
-
Placez le robot au dessus de la plaque de vision.
-
Disposez plusieurs objets sur la plaque, en veillant à inclure au moins 3 objets de chaque couleur (Rouge, Vert, Bleu).
-
-
Activation des Filtres :
-
Dans l'interface de contrôle de la vision, sélectionnez l'option "Tous" (ou "All") dans le menu déroulant des filtres de détection. Cela permet de visualiser comment les modifications affectent la détection de l'ensemble des formes et couleurs.
-
-
Ajustement des Paramètres Caméra :
-
Ajustez progressivement les paramètres de la caméra : Luminosité, Contraste et Saturation.
-
L'objectif est de trouver l'équilibre parfait qui permet à la caméra de détecter précisément les différents objets et leur forme, sans confusion.
-
⚠️ Conseil Clé (Exemple) : Assurez-vous qu'un objet de forme carrée n'est pas détecté avec son ombre. Une ombre trop prononcée peut déformer la détection et induire le système en erreur, lui faisant potentiellement confondre la silhouette résultante avec une autre forme (comme un cercle). L'ajustement du Contraste et de la Luminosité est souvent déterminant ici.
ÉTAPE 4 : Commencez à utiliser le kit Vision dans votre programme
Voici les blocs nécessaires pour commencer à utiliser vos outils :
Valeur de couleur
Permet de choisir une couleur parmi la liste des couleurs disponibles. Cette couleur sera utilisée dans le bloc Vision Pick et le bloc Est détecté.

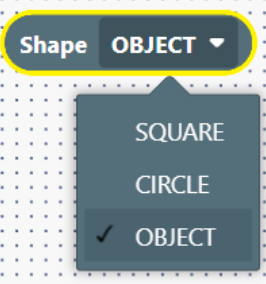
Forme
Permet de choisir une forme parmi la liste des formes disponibles. La forme sélectionnée sera utilisée dans le bloc Vision Pick et le bloc Est détecté.
Valeur d’espace de travail
Permet de choisir un espace de travail parmi la liste des espaces définis.
Vision Pick
Ce bloc permet au robot de saisir un objet correspondant au bloc Couleur et au bloc Forme.
Le processus de saisie est :
- Ouverture de la pince
- Déplacement au-dessus de l’objet (5 cm)
- Descente
- Fermeture de la pince
- Retour à l’étape 2.
La saisie aura lieu dans l’espace de travail sélectionné (default_workspace dans l’exemple).
Le décalage en hauteur correspond à la hauteur à laquelle l’effecteur final descendra pour prendre l’objet, en fonction de la hauteur de l’espace de travail.
Exemples de décalage en hauteur :
- Avec la Pompe à vide équipée, vous pouvez utiliser la hauteur de l’objet.
- Avec la Pince standard équipée, cela peut être la moitié de la hauteur de l’objet afin de le saisir par le milieu.
Ce bloc agit comme une condition et retourne donc un booléen.

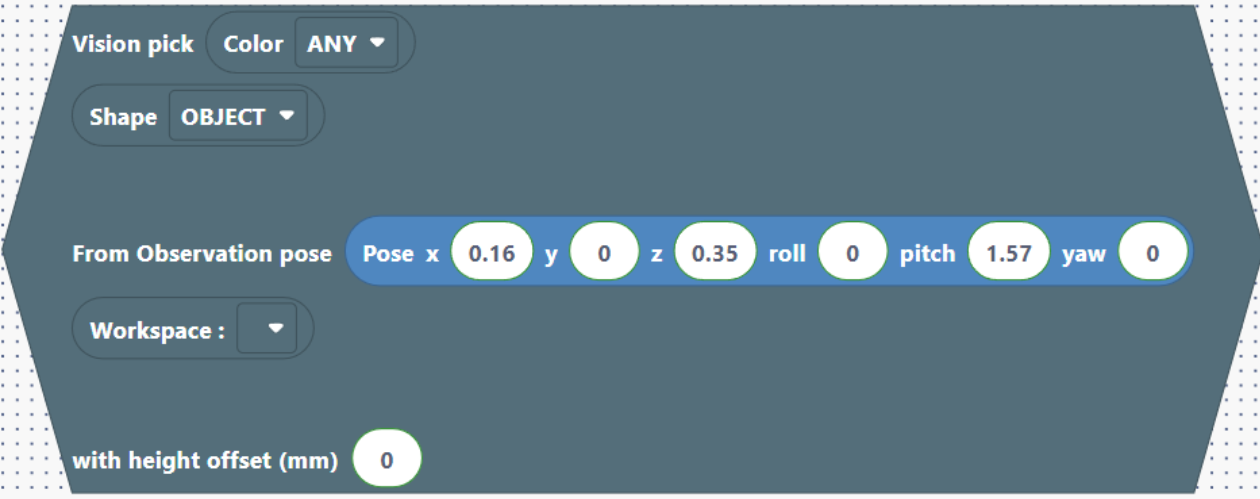
Vision Pick depuis une séquence de poses
Équivalent à un déplacement en pose d’observation suivi d’un Vision Pick.
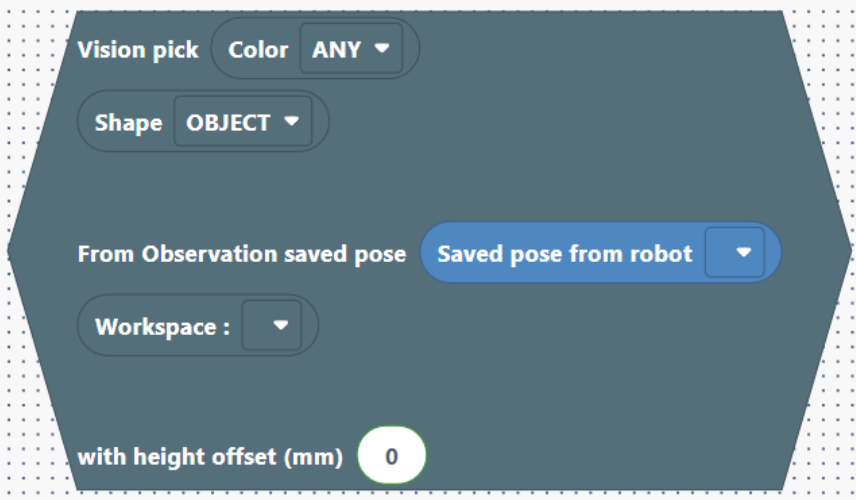
Vision Pick depuis une séquence de poses enregistrées
Équivalent à un déplacement en pose d’observation suivi d’un Vision Pick.
Condition : objet détecté
Indique si un objet correspondant au bloc Couleur et au bloc Forme est présent dans l’espace de travail.
Ce bloc retourne un booléen.

💡Démarrage rapide
Vous pouvez également télécharger le programme Blockly ici :