Intro
Kurse mit 'Intro' markiert
Sprachsteuerung des Ned2 mit Arduino
- Length: 4h
- Content Type: Lab
- Programming: Arduino
- Equipment: Bundle STEM
Szenario
Der Schüler entdeckt, wie man einfache Anweisungen zwischen einem Arduino und dem Raspberry Pi des Ned2 verbinden und kommunizieren kann. In dieser Übung bringt der Ned2-Roboterarm, je nach dem vom Bediener ausgesprochenen Wort, Behälter mit Bauteilen in Reichweite des Bedieners. Der Roboterarm wird mit Blockly programmiert und der Arduino mit C++.
Diese Übung simuliert die Interaktion eines Bedieners an einer Montagelinie mit einem Cobot zur Optimierung der TAKTZEIT.
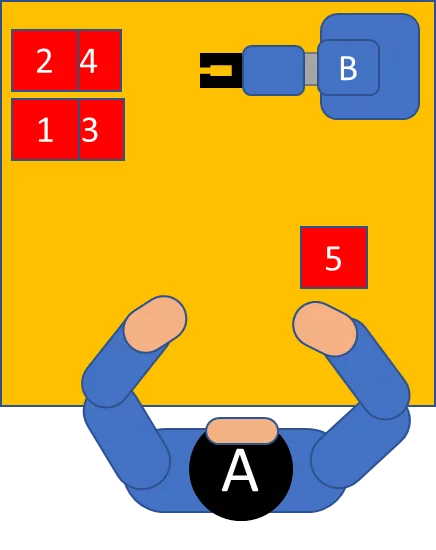
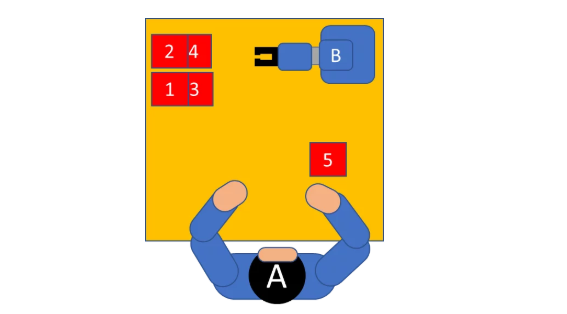
Der Bediener (A) arbeitet an einer Montagelinie, die kleine Haushaltsgeräte herstellt. Dieser Bediener befindet sich am Ende der Linie und testet die fertigen Produkte. An dem Produkt können 4 Elemente defekt sein. Wenn der Bediener ein Problem feststellt, fordert er den Roboterarm auf, ihm ein Ersatzteil zur Verfügung zu stellen.
Die 4 ersetzbaren Elemente befinden sich in Behältern an den Positionen 1, 2, 3 und 4. Wenn der Bediener ein defektes Bauteil nennt (z. B. Taste, Lüfter, Schalter, Kabel), nimmt der NED2-Roboterarm (B) den Behälter mit dem gewünschten Bauteil und positioniert ihn für 5 Sekunden in Position 5, damit der Bediener das Teil entnehmen kann.

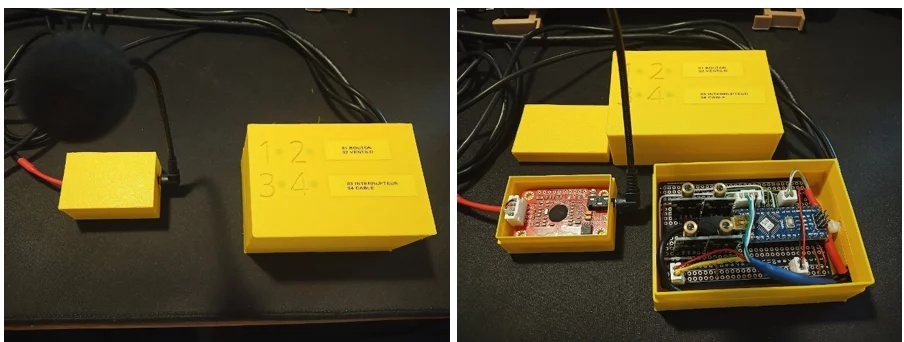
Das Spracherkennungsmodul ist mit einem Arduino Nano verbunden, und dieser ist mit den digitalen Pins auf der Rückseite des Ned2-Roboterarms verbunden.
Das Spracherkennungsmodul muss mit der Stimme des Bedieners trainiert werden. Dazu fordert das mit dem ELECHOUSE v3-Modultreiber gelieferte Trainingsprogramm den Bediener über ein Mikrofon auf, jedes Wort zur Identifikation eines Behälters mehrfach auszusprechen.
Laborinhalt
Kapitel 1: Einführung in Blockly
- Überblick über Blockly
Kapitel 2: Erstellung des Spracherkennungsmoduls
- Erstellen Sie ein Zubehörteil für den NED2-Roboterarm, das in der Lage ist, dem NED2-Bot mithilfe eines Arduino-Mikrocontrollers und eines ELECHOUSE v3-Spracherkennungsmoduls Befehle zu erteilen.
Kapitel 3: Erstellung von Bewegungssequenzen für den NED2-Roboterarm
- Führen Sie eine Pick-and-Place-Sequenz durch
Benötigte Ausrüstung
 Ned2
Ned2
 Adaptiver Greifer
Adaptiver Greifer
![]() NiryoStudio
NiryoStudio
![]() Arduino Nano
Arduino Nano
 ELECHOUSE v3
ELECHOUSE v3
Vorausgesetzte Kenntnisse
- Die Installation der Arduino-Programmierumgebung sowie das Hochladen des Arduino-Programms werden in diesem Dokument nicht erklärt.
- Es wird dringend empfohlen, vor dem Durchführen dieses Labors das Blockly-Einsteigerlabor und das Arduino-Steuerungslabor für Ned2 abzuschließen, wenn Sie Blockly nicht gewohnt sind.
Einrichtung
- Platzieren Sie den Ned2-Roboterarm auf einem Tisch.
- Der Ned2-Roboterarm benötigt eine hindernisfreie Fläche mit einem Radius von ca. 60 cm.
- Verbinden Sie den Ned2-Roboterarm mit der Sicherheitsbox des NED2-Roboterarms.
- Verbinden Sie die Sicherheitsbox mit der Stromversorgung des NED2-Roboterarms.
- Verbinden Sie die Stromversorgung des NED2-Roboterarms mit dem Stromnetz.
- Verbinden Sie den Ned2-Roboterarm mit NiryoStudio.
- Verbinden Sie die Arduino-Box mit dem Ned2-Roboterarm (sobald die Box montiert ist).
- Eingeschriebene Teilnehmer/innen: 10