Intro
Cours signalées avec « Intro »
Commande vocale du Ned2 avec Arduino
- Length: 4h
- Content Type: Lab
- Programming: Arduino
- Equipment: Bundle STEM
Scenario
L’élève découvre comment connecter et communiquer des instructions simples entre un Arduino et le Raspberry Pi du Ned2. Dans cet exercice, le bras robotique Ned2 en fonction du mot dit par l’opérateur, amène à la portée de l’opérateur des bacs avec des pièces. Le Bras Robotique est programmé avec Blockly et l’Arduino est programmé en C++.
Cet exercice simule l’interaction d’un opérateur d’une chaine de montage avec un cobot pour optimiser le “TAKT TIME”.
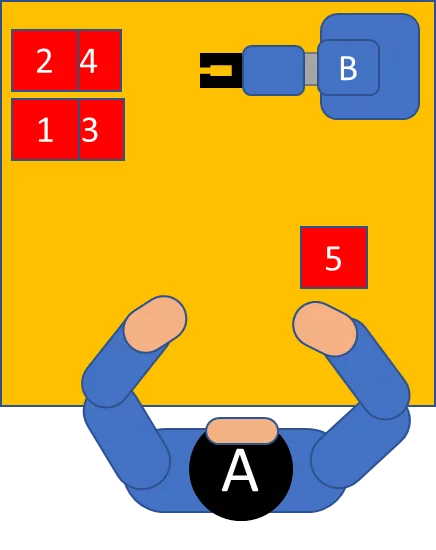
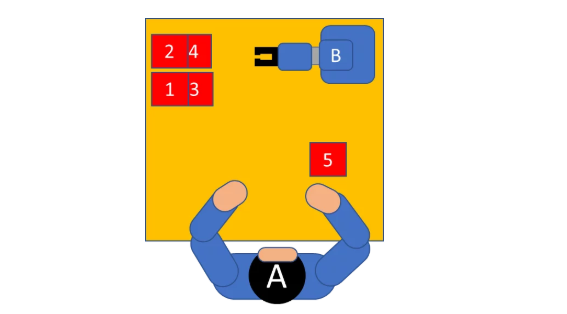
L’opérateur (A) travaille sur une ligne d’assemblage de petit électroménager. Cet opérateur est en fin de ligne et teste les produits finis. Sur le produit, 4 éléments peuvent présenter un défaut. Si l’opérateur détecte un souci, il/elle demande au bras robotique de lui fournir un composant pour remplacer l’élément défectueux.
Les 4 éléments qui peuvent être remplacés sont dans des conteneurs dans les positions 1, 2 3 et 4. L’opérateur, quand il nome un composant défectueux (par exemple : Bouton, Ventilateur, Switch, Câble) le bras robotique NED2 (B) prend le conteneur avec le composant demandé et le positionne pendant 5 secondes en la position 5 a fin que l’opérateur puisse prendre une pièce du conteneur.

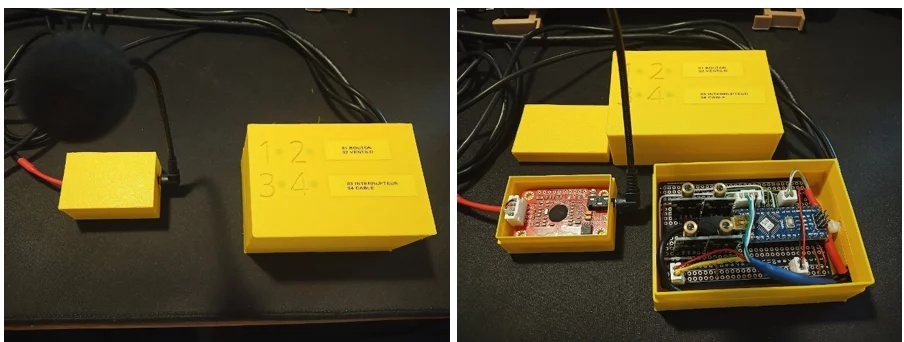
Le module de reconnaissance vocale est connecté à un Arduino Nano et l’Arduino Nano est connecté aux broches numériques du panneau arrière du bras robotique Ned2.
Le module de reconnaissance vocale doit être entraîné avec la voix de l’opérateur. Pour cela, à l’aide du microphone, le programme d’entraînement fourni avec le driver du module Elechouse v3 demande à l’opérateur de dire chaque mot pour identifier un bac plusieurs fois.
Contenu du TP
Chapitre 1 : Découverte de Blockly
- Présentation de Blockly
Chapitre 2 : Création du module de reconnaissance vocale
- Créer un accessoire pour le Bras Robotique NED2 capable de donner des ordres au Bras Robotique NED2 grâce à un microcontrôleur Arduino et module de reconnaissance vocale ELECHOUSE v3.
Chapitre 3 : Création des séquences de mouvement du bras robotique NED2
- Réaliser une sequence de Pick and Place
Equipement requis
 Ned2
Ned2
 Gripper adaptatif
Gripper adaptatif
![]() NiryoStudio
NiryoStudio
![]() Arduino Nano
Arduino Nano
 ELECHOUSE v3
ELECHOUSE v3
Prérequis
- L’installation de l’environnement de programmation d’Arduino, ainsi que le téléversement du programme de Arduino n’est pas expliquée dans ce document.
- Il est fortement recommandé de réaliser le TP prise en main de Blockly et le TP Commande du Ned2 avec boitier Arduino avant la réalisation de ce TP si vous n’avez pas l’habitude d’utiliser Blockly.
Installation
- Placer le bras robotique Ned2 sur une table. Le bras robotique Ned2 doit avoir un périmètre libre d’obstacles d’environ 60 centimètres de rayon.
- Brancher le bras robotique Ned2 au boîtier de sécurité du bras robotique NED2
- Brancher le boîtier de sécurité du bras robotique NED2 à l’alimentation électrique du bras robotique NED2
- Brancher à l’alimentation électrique du bras robotique NED2 au réseau électrique
- Connecter le bras robotique Ned2 à NiryoStudio
- Connecter le boîtier Arduino au bras robotique Ned2 (Une fois monté le boîtier)
- Étudiants inscrits: 10