Pilotage via un automate Schneider et Machine Expert Basic (I/O Adapter)
Tutoriel
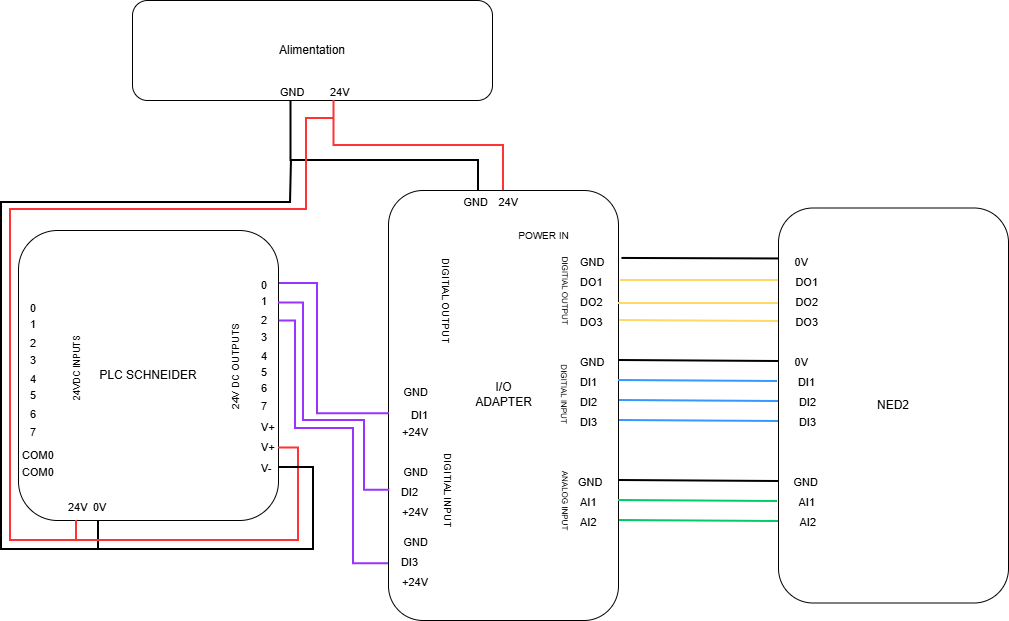
Branchements électriques du système
Dans cette première phase de tutoriel, nous allons voir comment brancher l'I/O Adapter avec le PLC Siemens d'un côté et le robot Ned2. Pour cela, une alimentation qui peut fournir du 24V est nécessaire (pour alimenter l'I/O Adapter). On alimente les sorties de PLC avec son propre 24V (câble qui relie L+ à 1L). Voici donc les branchements à suivre:
Configuration de l'interface sur Machine Expert Basic
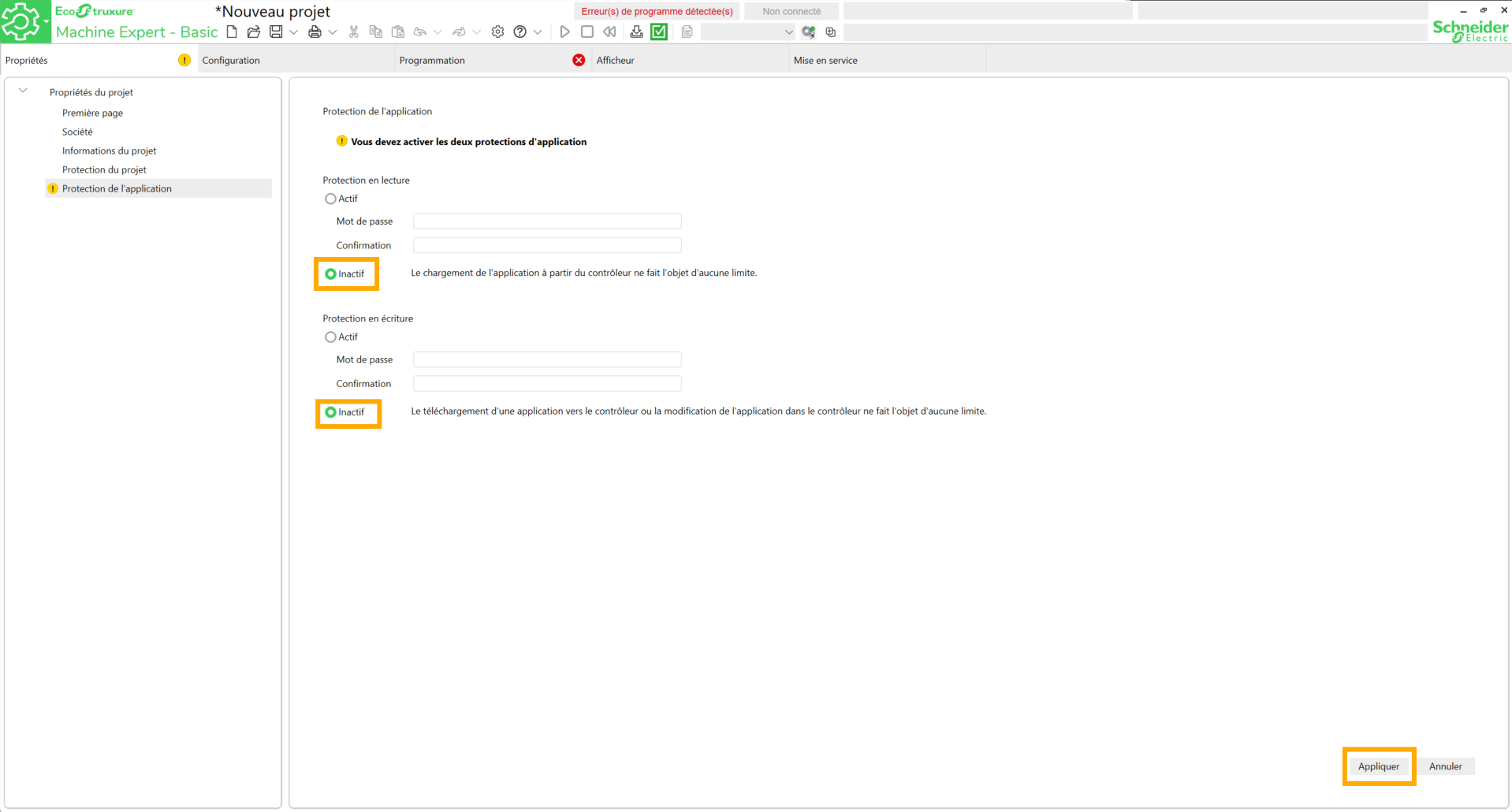
Sur ordinateur, ouvrir le logiciel Machine Expert Basic.
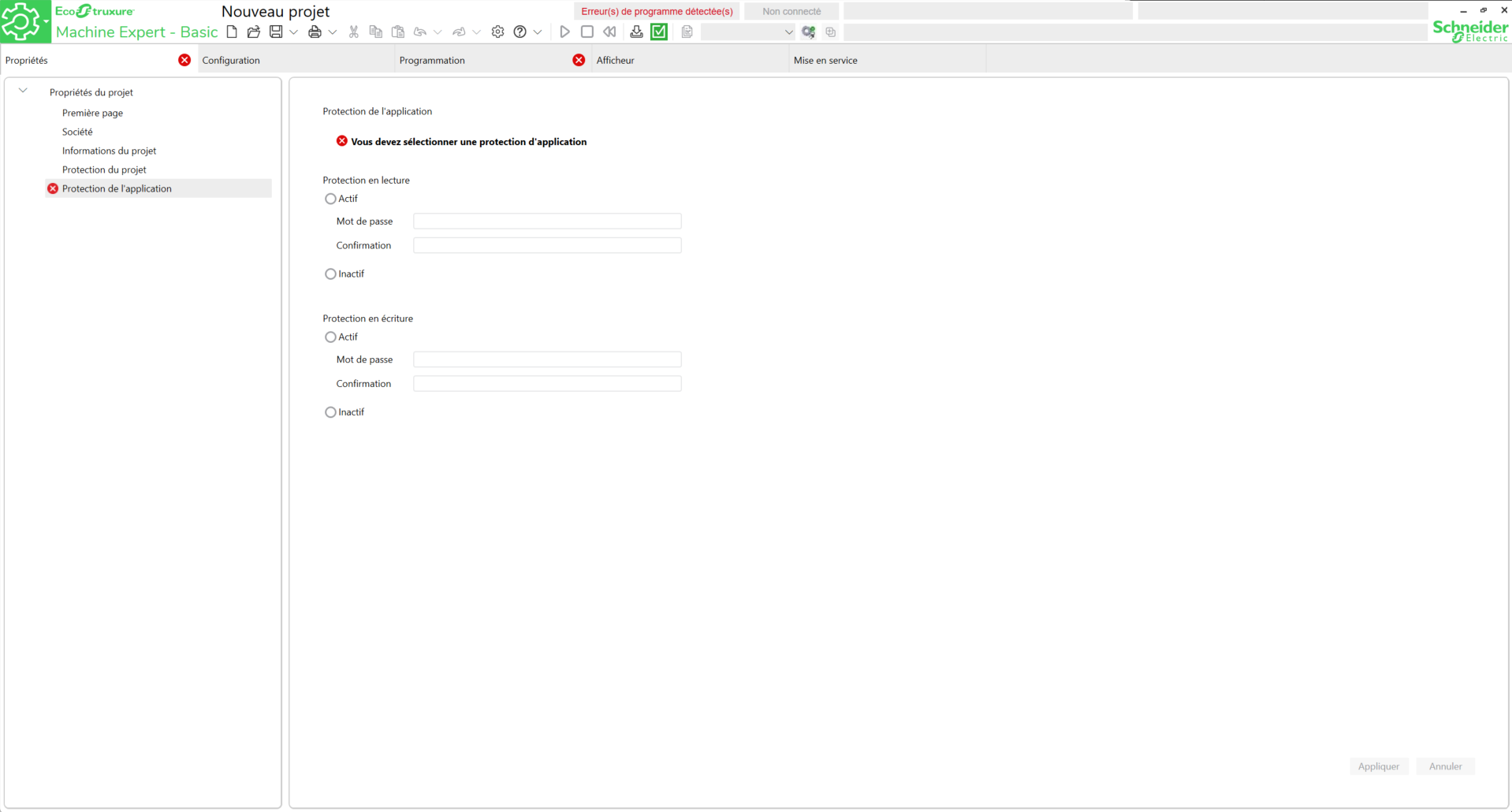
Dans un premier temps, configurer un mot de passe pour les deux types de protections. Pour plus de facilité, mettre les protections en Inactif puis cliquer sur Appliquer.
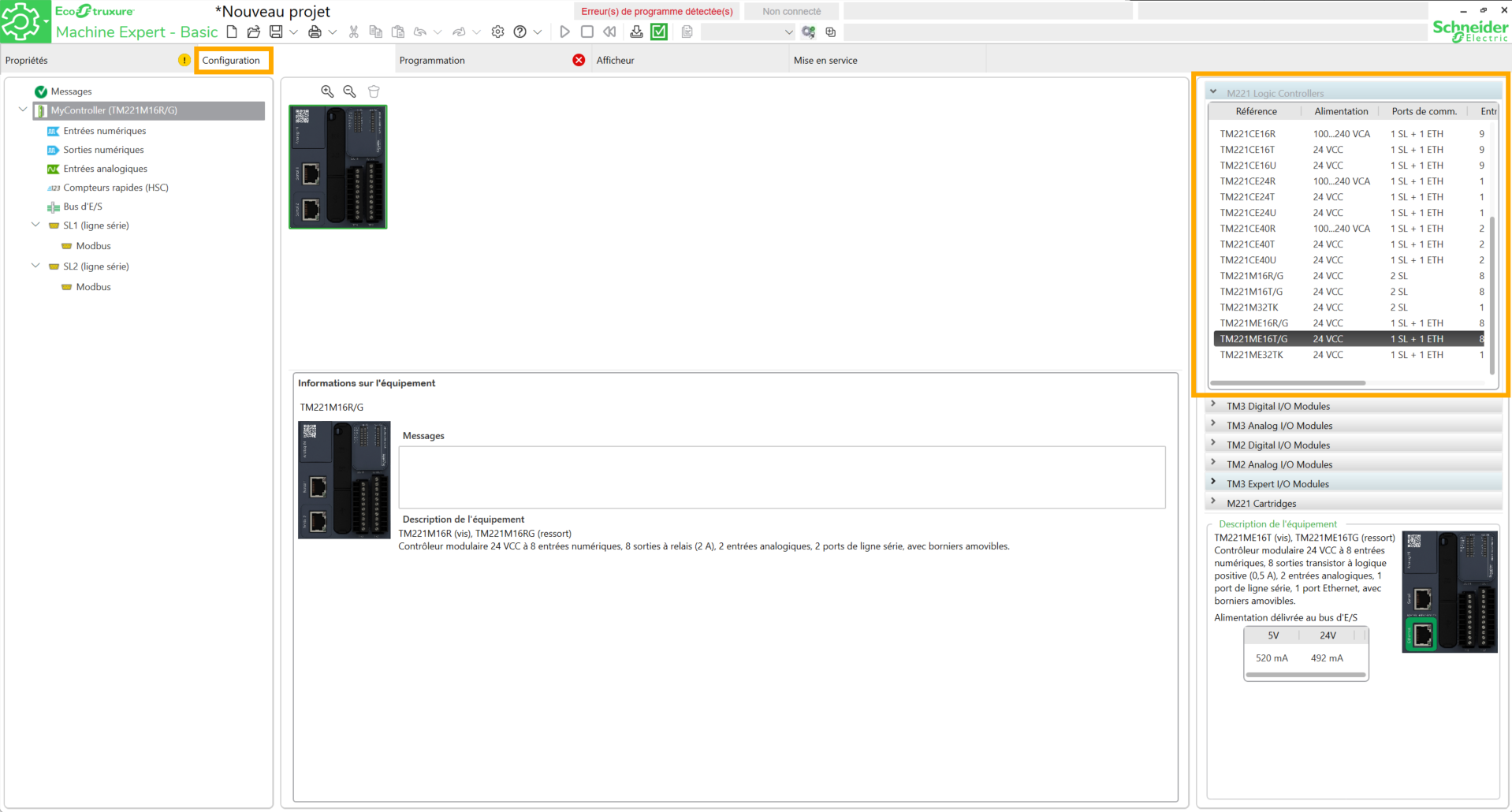
Aller sur l'onglet Configuration et rechercher la référence du PLC.
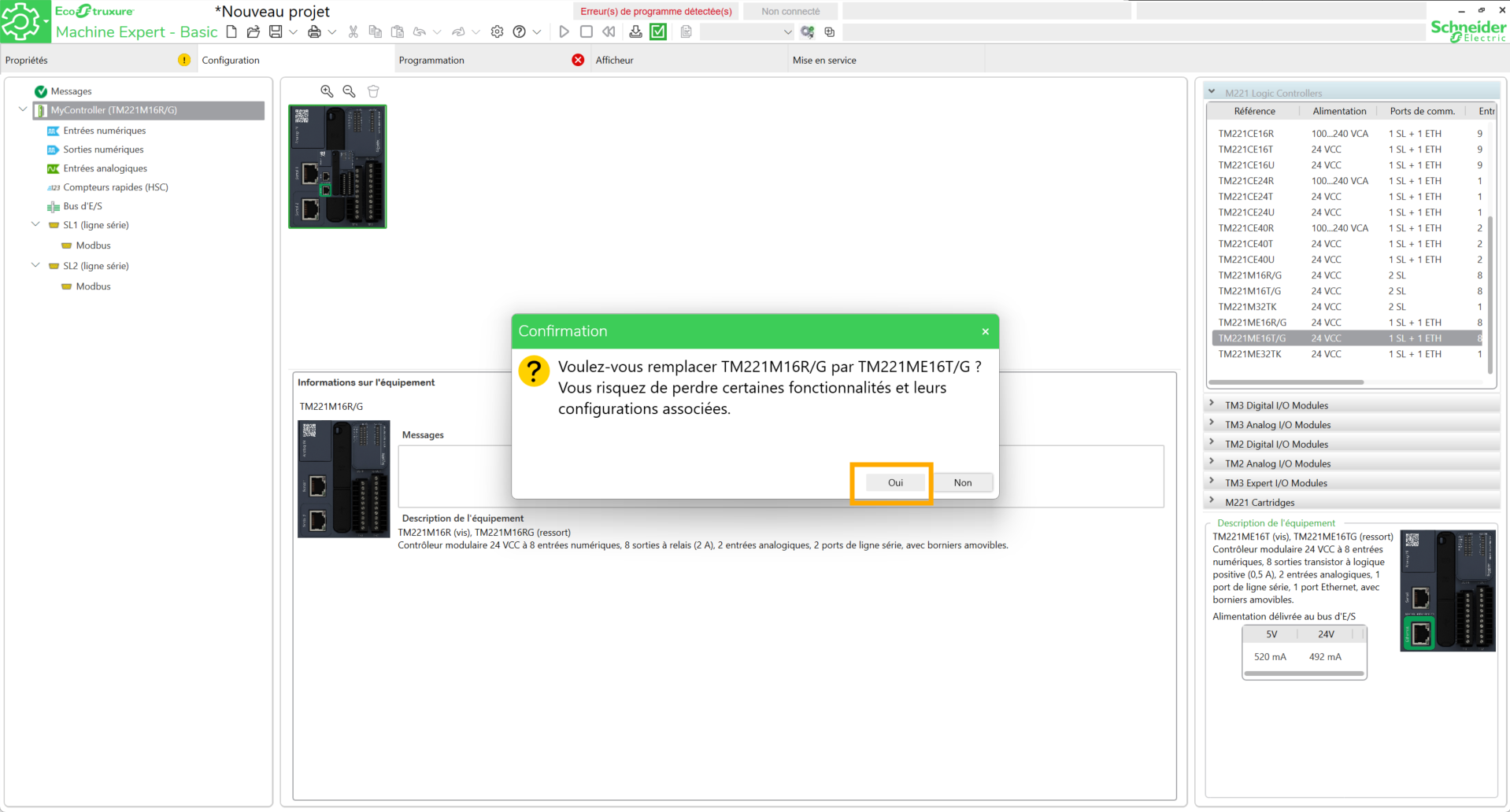
Glisser-déposer le bloc sur l'espace de travail et cliquer sur Oui.
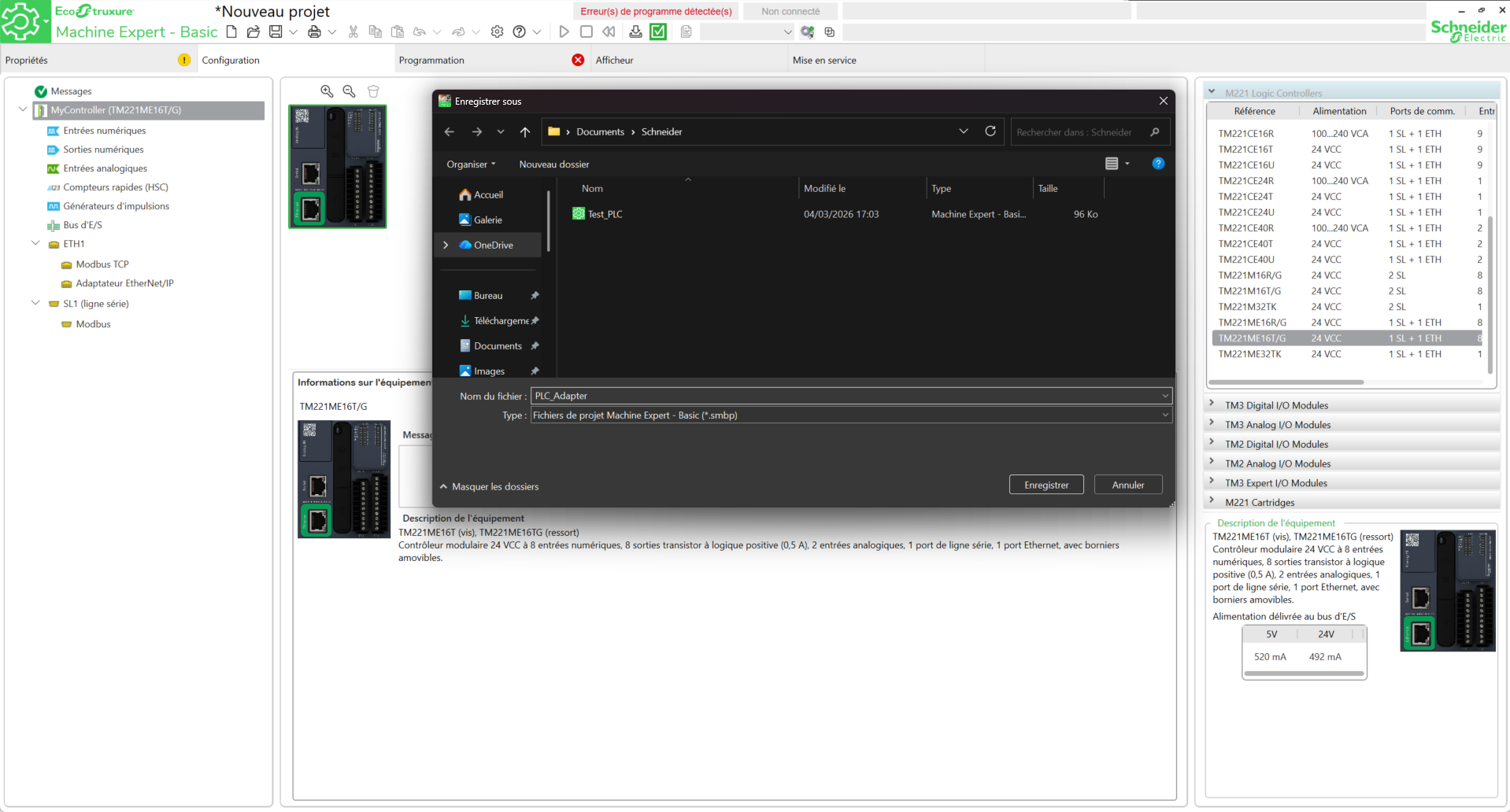
Enregistrer le projet.
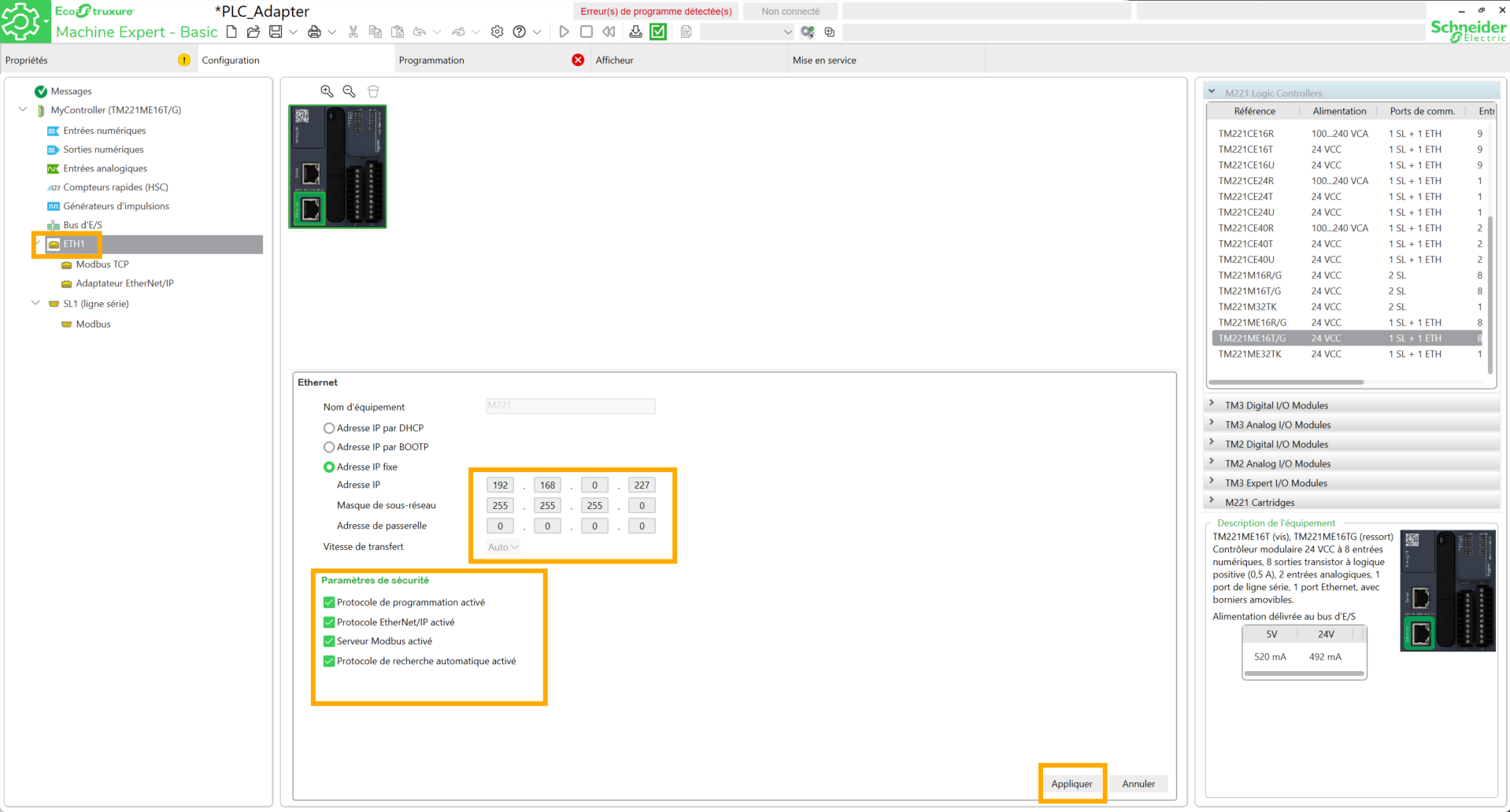
Aller sur ETH1, configurer une adresse IP disponible, cocher les quatre cases en dessous et cliquer sur Appliquer.
Aller dans l'onglet Mise en service. L'adresse IP renseignée précédemment doit apparaitre dans le champ Equipements Ethernet. Pour vérifier la connexion au PLC, cocher les cases à proximité de l'adresse IP, puis cliquer sur celle-ci et enfin cliquer sur Connexion.
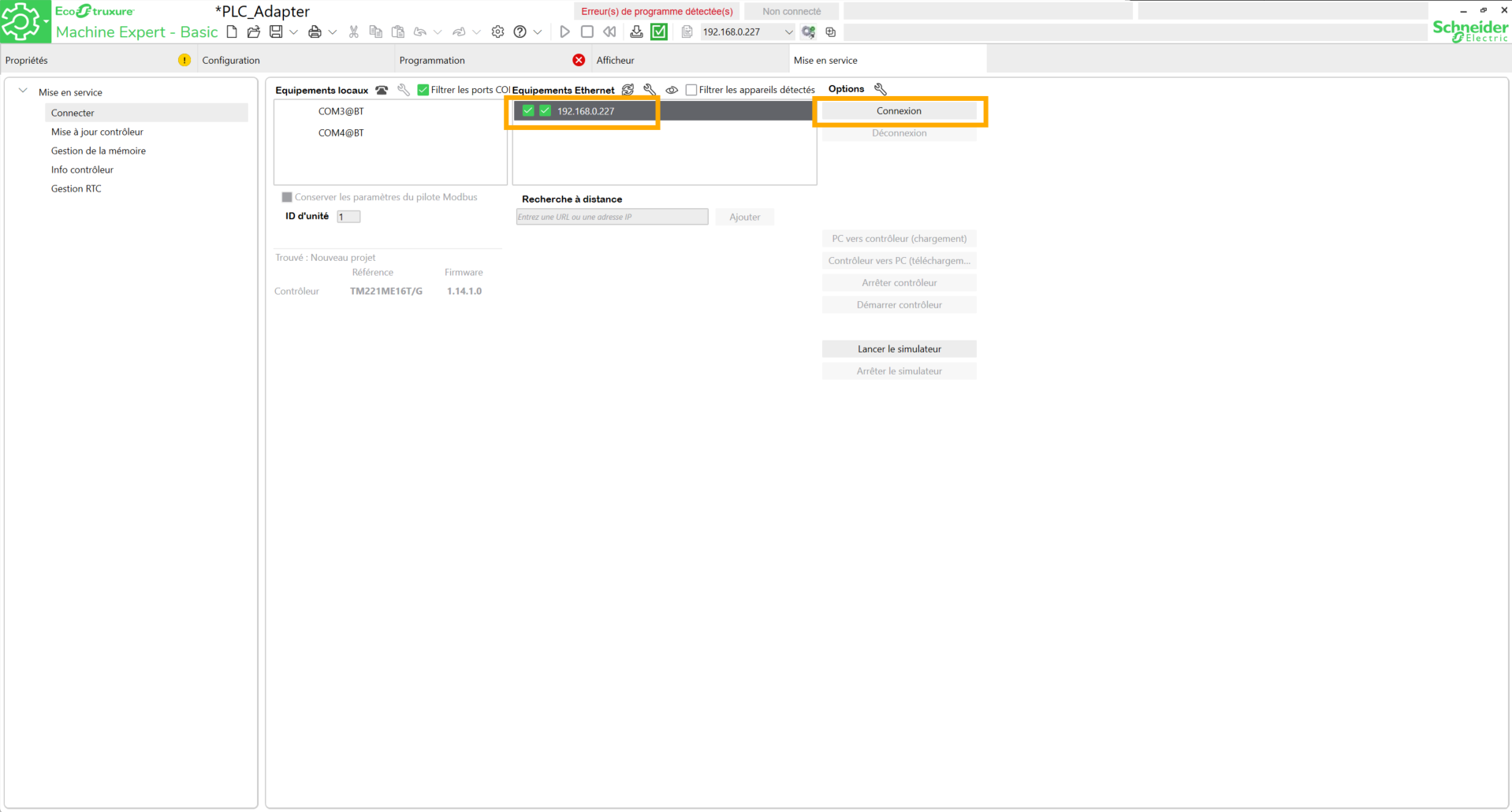
Si la connexion s'est faite, la mention En ligne.

Cliquer sur Deconnexion.
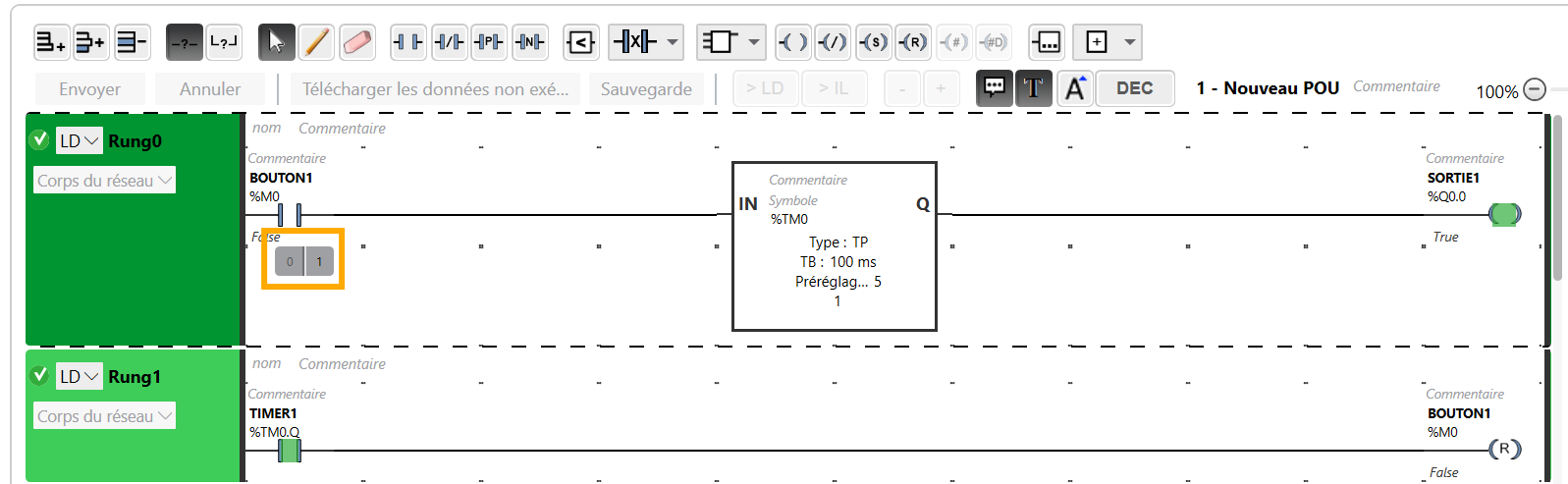
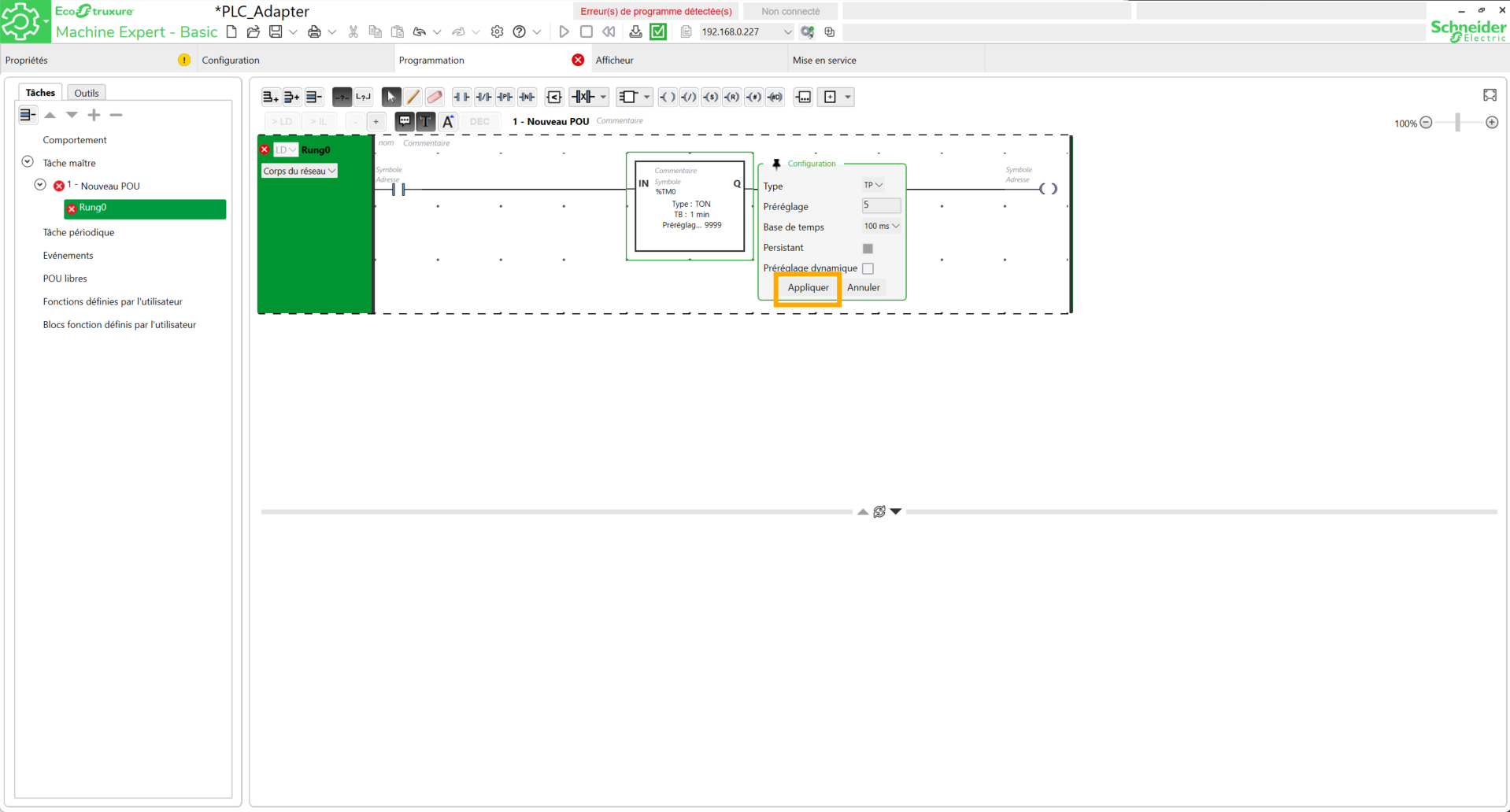
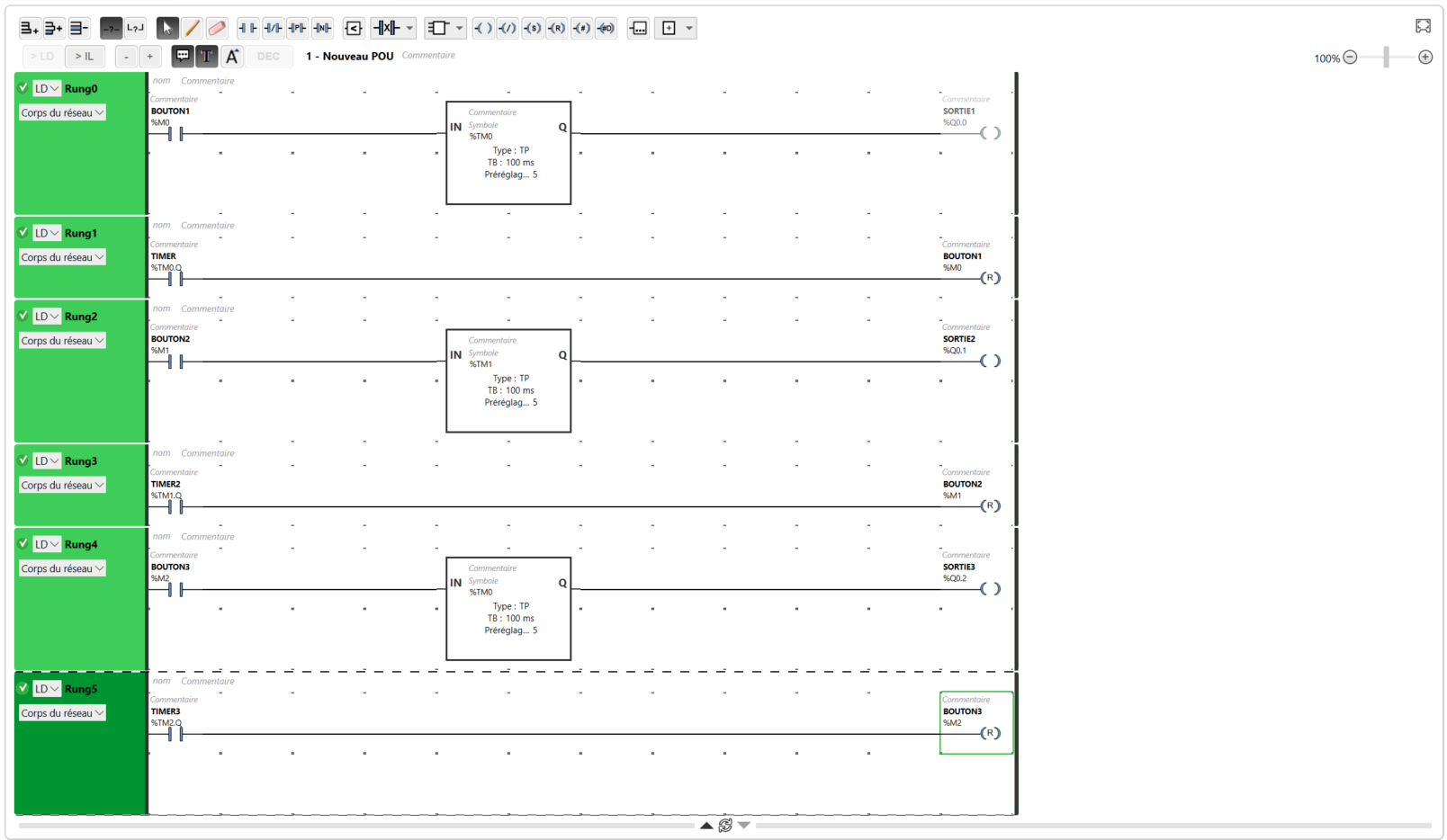
Aller sur l'onglet Programmation. Dans les prochaines étapes, on va créer un code en Ladder simulant des boutons poussoirs physiques.
Pour cela, ajouter un contact, un bloc de temporisation ainsi qu'une bobine sur le Rung0. Configurer le bloc de temporisation à 500ms en TP. Cliquer sur Appliquer.
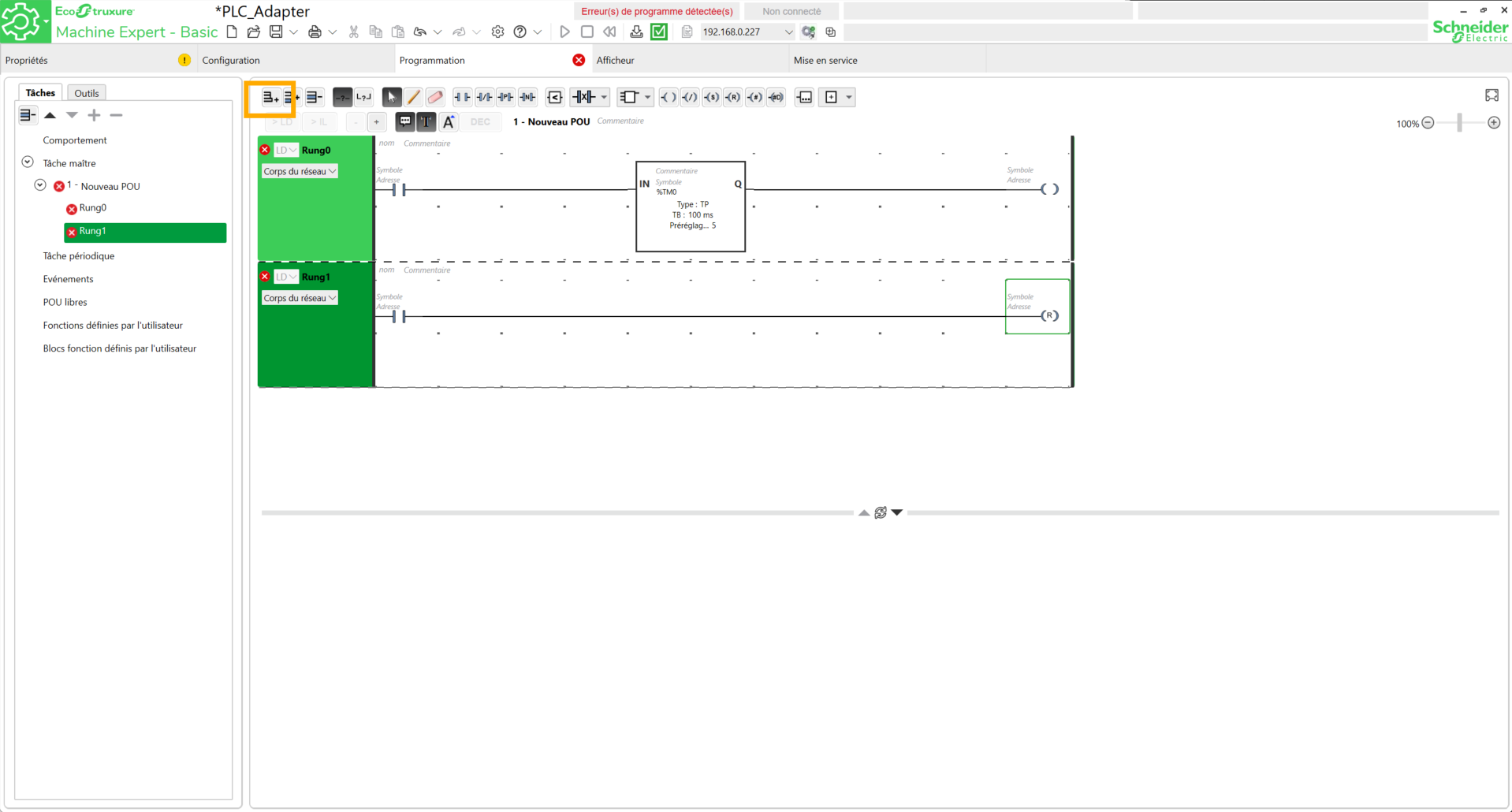
 Ajouter un nouveau réseau, puis ajouter sur celui-ci un nouveau contact et une bobine de réinitialisation.
Ajouter un nouveau réseau, puis ajouter sur celui-ci un nouveau contact et une bobine de réinitialisation.
Au niveau du premier contact, ajouter l'adresse %M0 et pour le symbole, mettre Bouton1. Une fenêtre contenant un message pour confirmer le choix doit apparaitre. Cliquer sur Oui.
Remplir les autres éléments de la même manière qu'indiqué sur l'image suivante.
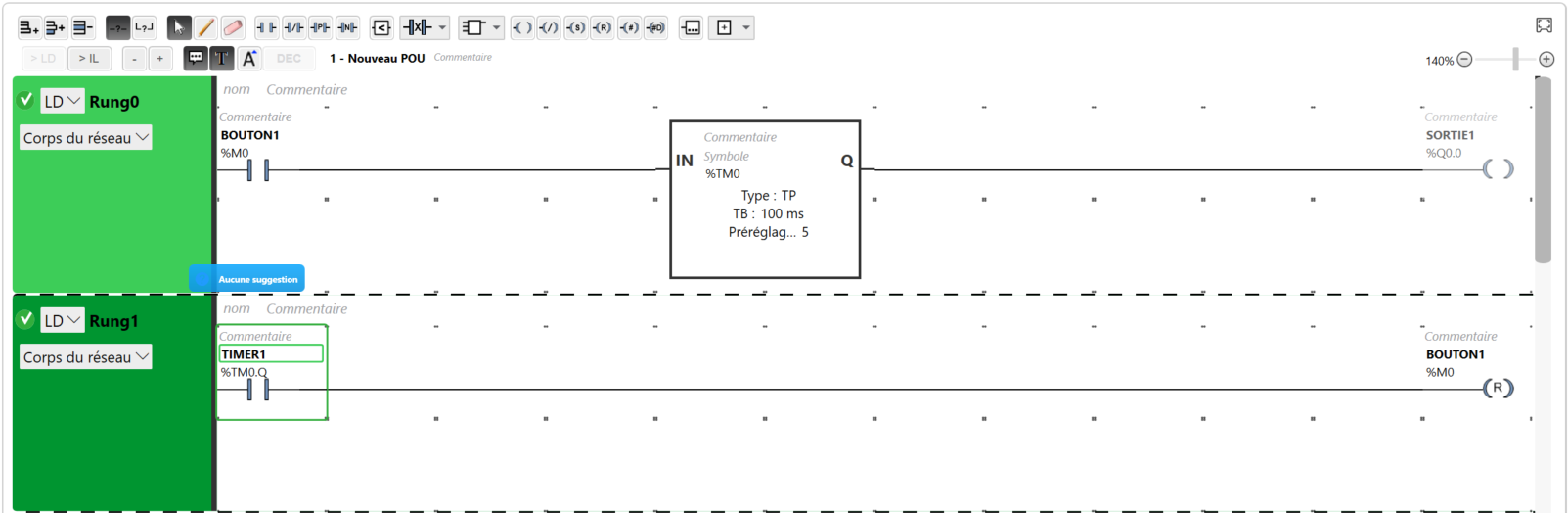
Voilà, le premier bouton simulé est créé. On peut dupliquer la même logique pour créer d'autres boutons.
Programmation côté robot
Ce script permet de commander le robot directement par des signaux électriques envoyés par le PLC sur ses ports DI1, DI2 et DI3. Dans un IDE (Visual Studio), copier le code retrouvable ici.
Voici quelques explications pour mieux comprendre son rôle.
1. Interaction avec le Matériel
Ce code interroge l'état physique des broches du robot :
-
Lecture des signaux : la fonction robot.digital_read() surveille en continu si une tension est présente sur les entrées.
-
PinState.HIGH : le robot détecte si un bouton est pressé ou si l'automate envoie un signal "Tout ou rien" (24 V transformé en 5V).
2. Rôle des Commandes Physiques
La logique est simplifiée en trois actions directes déclenchées par chaque entrée :
-
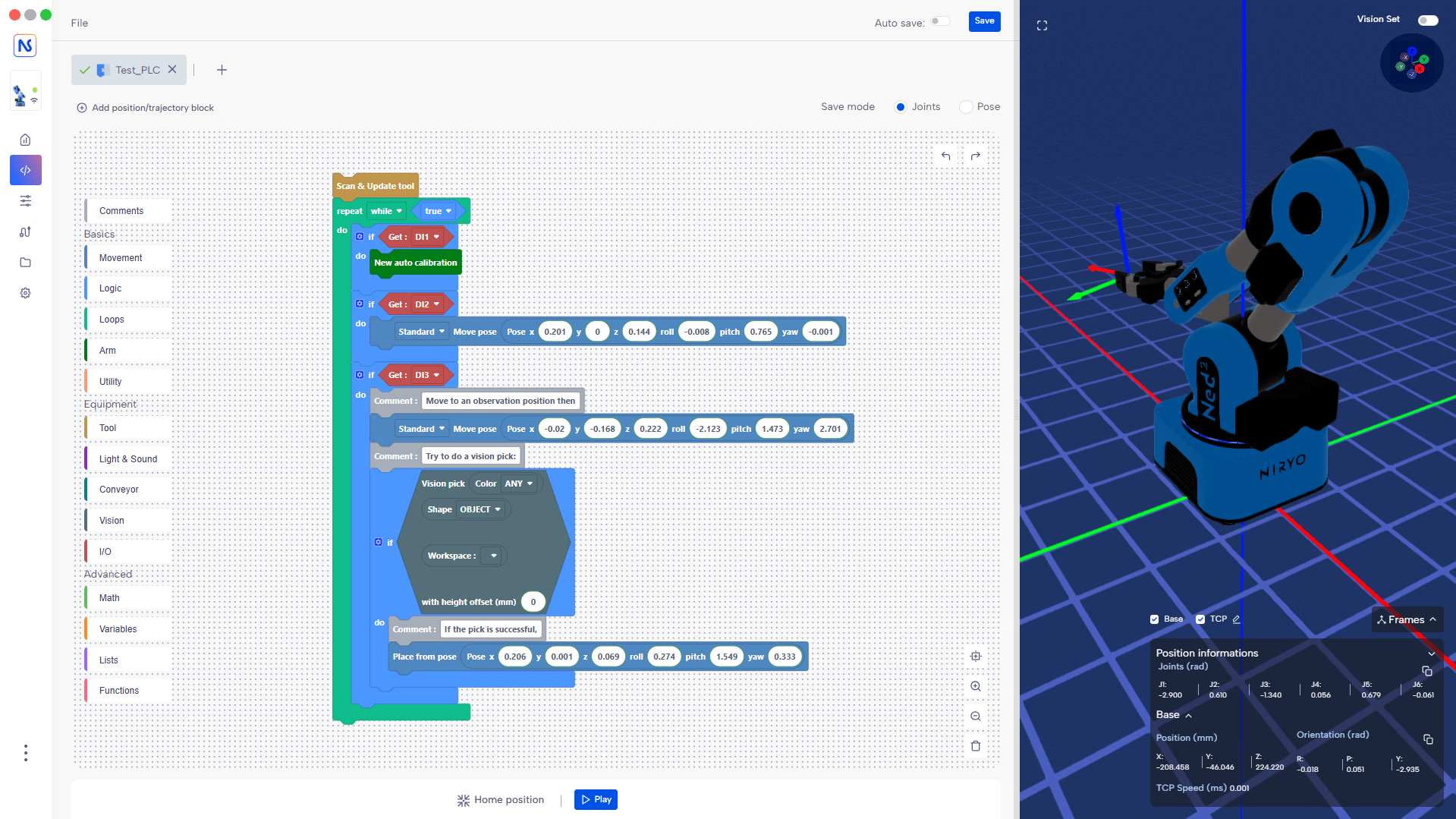
DI1 (Entrée 1) : lance la procédure de calibration auto pour réinitialiser les moteurs.
-
DI2 (Entrée 2) : ordonne le déplacement immédiat vers la position HOME.
-
DI3 (Entrée 3) : déclenche le cycle de Vision Pick & Place.
3. Logique et Stabilité
-
Boucle de contrôle : le programme scrute les entrées toutes les 0,5 secondes (robot.wait(0.5)) pour éviter de saturer le processeur tout en restant réactif.
-
Priorité : la structure en if/elif assure qu'une seule action est traitée à la fois, évitant ainsi que le robot ne tente de réaliser deux mouvements contradictoires simultanément.
Il existe la version Blockly, retrouvable ici.
Tests
Sur Machine Expert Basic, activer la connexion avec le PLC puis démarrer le contrôleur. En forçant la valeur des contacts BOUTONX, on active les sorties du PLC permettant de lancer les différentes actions prédéfinies dans le programme du robot.