Introduction
Cours signalées avec « Introduction »
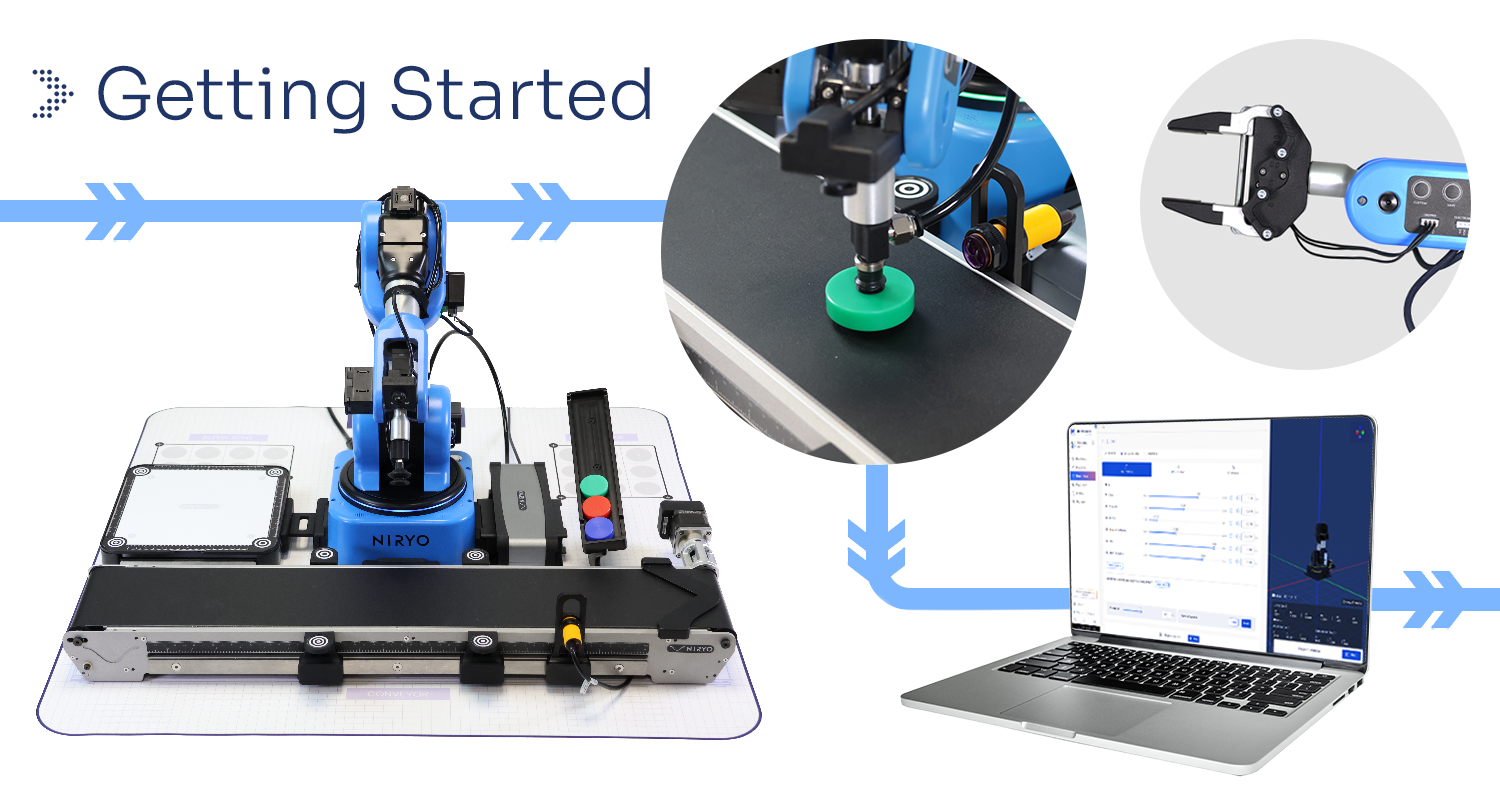
Bienvenue dans votre parcours de prise en main du Ned2 et du Discovery Bundle.
Ce parcours vous propose un guide pas à pas pour vous aider à configurer et utiliser votre robot Ned2 ainsi que ses accessoires.
Tout au long de ce parcours, vous apprendrez à :
-
Installer votre Discovery Bundle
-
Connecter le robot Ned2 à l’aide de NiryoStudio
-
Installer et contrôler depuis NiryoStudio les accessoires (pinces, convoyeur, kit vision)
-
Programmer le robot avec Blockly et Python, à travers des exemples prêts à l'emploi
À la fin de ce parcours, vous aurez toutes les clés en main pour commencer à intégrer le Ned2 dans vos cours et accompagner vos élèves dans des activités pratiques autour de la robotique.
🎯 Conçu pour les enseignants. Prêt pour la salle de classe. C’est parti !
- Étudiants inscrits: 27
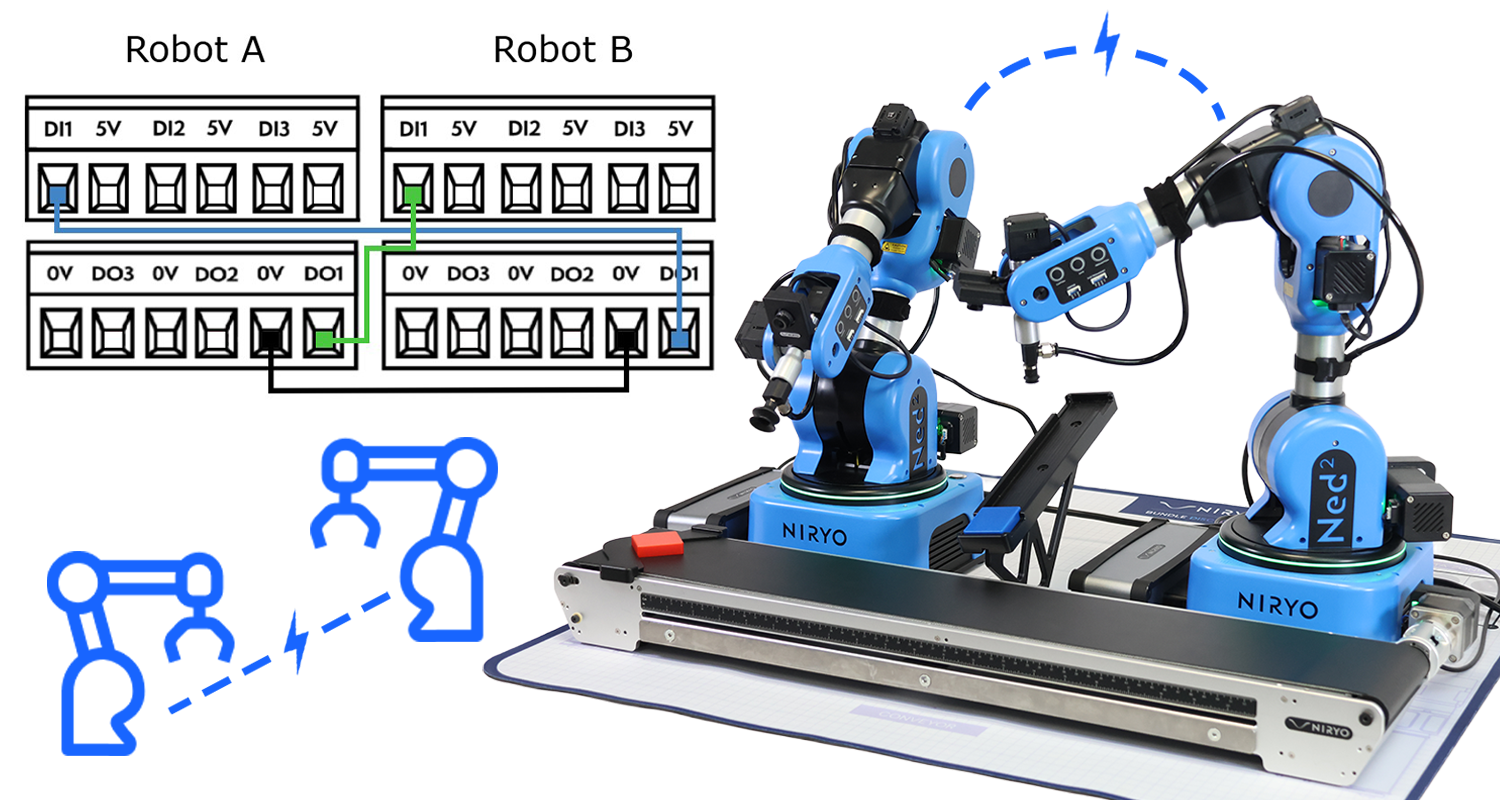
2 Ned2 travaillant dans une zone partagée
- Content Type: Tutorial
- Equipment: Ned2
- Étudiants inscrits: Il n’y a encore aucun étudiant inscrit à ce cours.

Robotique, programmation par blocs & automatisation
- Length: 35h
- Content Type: Curriculum
- Programming: Blockly
- Equipment: Bundle discovery
📦 Inclus dans le Pack d'introduction à la robotique Niryo : Découvrir le Pack Robotique & Programmation par Blocs
Découvrez le monde de la robotique avec notre programme complet, conçu pour les étudiants et les enseignants désireux d'explorer les fondamentaux de l'automatisation, de la programmation et des applications robotiques. Ce cours guide les apprenants depuis les bases de l'histoire de la robotique jusqu'à la programmation pratique et l'automatisation industrielle à l'aide du robot collaboratif NED2 (cobot) et de la programmation Blockly.
À qui s'adresse ce cours ?
- ✔️ Étudiants du secondaire et de l'enseignement supérieur dans les programmes CTE ou STEM
- ✔️ Enseignants à la recherche d'un programme structuré en robotique
- ✔️ Débutants désireux d'apprendre l'automatisation robotique avec une approche sans code
- ✔️ Toute personne intéressée par la robotique industrielle et l'automatisation
Rejoignez-nous dès aujourd'hui et faites votre premier pas vers la maîtrise de la robotique et de l'automatisation ! 🚀
Ce cours permet aux étudiants d'obtenir les certifications SACA C-103 et C-215

- Enseignant: Malcom Niryo
- Étudiants inscrits: 226

Cybersécurité appliquée à la robotique
- Length: 25h
- Content Type: Curriculum
- Programming: Python
- Equipment: Ned2
📦 Inclus dans le Pack Cybersécurité Niryo : Découvrir la Solution du Pack Cybersécurité
Sécurisez l'Industrie du Futur avec le Ned2
Maîtrisez la sécurité des systèmes physiques avec notre programme "Cybersécurité appliquée à la robotique". En utilisant le bras robotique Ned2, les étudiants sortent de l'abstraction pour comprendre l'impact réel d'une faille numérique sur le monde physique. Ce parcours transforme l'apprenant d'une vision naïve à une expertise critique grâce à un scénario industriel immersif.
Qu'allez-vous apprendre ?
- Analyse des risques, modélisation des menaces et compréhension du modèle Confidentialité – Intégrité – Disponibilité (CID / CIA) appliqué à un système industriel réel, avec le robot Ned2.
- Audit de sécurité, sécurisation et durcissement (hardening) d’un système robotisé connecté (le réseau, les accès, les services et la surveillance).
- Maîtrise des fondamentaux réseau et utilisation d’outils professionnels d’analyse, de diagnostic et supervision.
- Compréhension et application des principes essentiels de la cryptographie.
- Simulation d’attaques, analyse post-incident et mise en place de stratégies de défense adaptées à un environnement connecté.
- Développement d’une culture cyber industrielle et capacité à évaluer l’impact concret d’une faille sur un système physique.
À qui s'adresse ce cours ?
- Étudiants du secondaire et du supérieur, aux filières technologiques et professionnalisantes (Bac Pro, BTS, IUT, Écoles d'ingénieurs).
- Débutants souhaitant découvrir la cybersécurité à travers une approche progressive, structurée, accessible et surtout fondée sur la pratique.
- Toute formation liée à la robotique, à l’automatisation, aux systèmes embarqués, à la cybersécurité industrielle ou plus largement à la sécurité des systèmes industriels.
- Étudiants inscrits: 159

Curriculum STEM
- Length: 35h
- Content Type: Curriculum
- Programming: Blockly
- Equipment: Bundle STEM
📦 Inclus dans le Pack STEM Niryo : Découvrir la Solution Complète du Pack STEM
Conçu spécifiquement pour les programmes STEM, ce parcours d’apprentissage accompagne élèves et enseignants dans la découverte concrète de la robotique moderne. À travers une approche interdisciplinaire mêlant sciences, technologie, ingénierie et mathématiques, les apprenants explorent les fondamentaux de la robotique, de l’automatisation et de la programmation visuelle. Une ressource idéale pour initier les jeunes aux compétences clés de demain et leur donner les moyens de comprendre, manipuler et concevoir des systèmes robotiques intelligents.
À qui s'adresse ce cours ?
- ✔️ Pour les enseignants STEM (sciences, technologie, ingénierie, mathématiques)
- ✔️ Mise en application concrète de concepts de robotique
- ✔️ Challenges ludiques et pratiques pour animer vos cours, ateliers ou clubs de robotique
- ✔️ Développement de la logique, de la créativité et du travail en équipe
- Étudiants inscrits: 171

Ma première automatisation avec Blockly
- Content Type: Lab
- Programming: Blockly
- Equipment: Bundle discovery
Apprenez à réaliser votre première automatisation avec Blockly
Dans ce cours, vous programmerez votre robot Ned2 pour détecter, saisir et déplacer des objets de manière autonome grâce à Blockly.
Pas à pas, vous apprendrez à combiner la vision, le contrôle du convoyeur et les mouvements du robot pour réaliser un cycle d’automatisation complet.
Prérequis :
- Étudiants inscrits: 112
Pick & Place de Précision avec le PID de l’Axe 5
- Length: 4h
- Content Type: Lab
- Programming: Blockly
- Equipment: Ned2
⚠️ Module additionnel requis
Pour suivre ce cours, l'activation du module additionnel gratuit "PID" sur NiryoStudio est nécessaire. Pour l'activer, veuillez contacter l'équipe NiryoSuccess : customersuccess@niryo.com
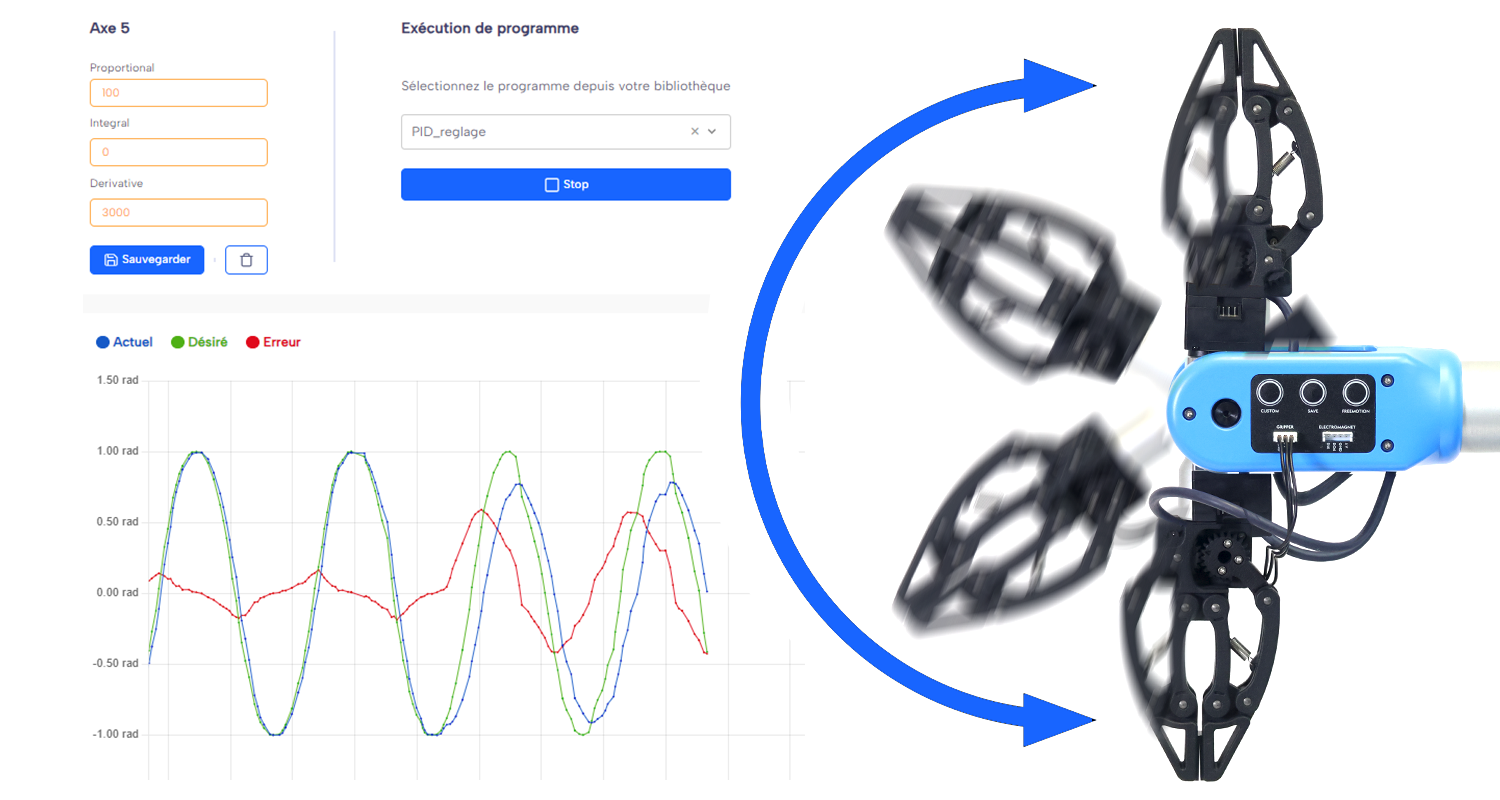
Pick & Place de Précision avec le PID de l’Axe 5
Cette activité pratique prolonge l’atelier sur le contrôle PID en vous permettant d’appliquer la théorie à une tâche concrète : réaliser un mouvement de pick & place fluide et précis grâce au réglage des gains du poignet (axe 5) du robot Niryo.
À travers des expérimentations guidées, vous étudierez l’influence des gains proportionnel (P), intégral (I) et dérivé (D) sur le comportement du mouvement — rapidité, stabilité et précision. Vous apprendrez ensuite à régler le PID pour atteindre un équilibre parfait entre réactivité et fluidité, sans oscillations ni dépassements.
L’activité se conclut par un défi final : empiler plusieurs objets pour former une tour stable, en ajustant les paramètres PID pour que la manipulation reste parfaitement contrôlée.
- Étudiants inscrits: 36

De Blockly à Python avec le robot Ned2
- Length: 8
- Content Type: Lab
- Programming: Python
- Equipment: Simulation
🎓 De Blockly à Python avec le robot Ned2
Ce cours accompagne les apprenants dans leur transition progressive de la programmation visuelle Blockly à la programmation textuelle en Python, en s’appuyant sur le robot collaboratif Ned 2.
À travers trois unités complémentaires, les étudiants consolident leurs compétences en logique de programmation, découvrent les bases de Python et réalisent leurs premiers scripts complets pour piloter un robot réel.
Unité 1 — Blockly avancé
L’étudiant approfondit ses connaissances en programmation visuelle avec Blockly.
Il apprend à structurer ses programmes, à adopter les bonnes pratiques de développement (modularité, clarté, réutilisation du code) et à résoudre des problèmes plus complexes à l’aide du robot Ned2.
Concepts abordés:
- Commentaires
- Séquences
- Variables
- Boucles
- Conditions
- Fonctions
- Listes
Unité 2 — De Blockly à Python
Cette unité constitue le pont entre le visuel et le textuel.
Grâce à une série de challenges pratiques, l’apprenant découvre comment les blocs Blockly se traduisent en instructions Python, et développe une compréhension intuitive du langage.
Activité 1 - Comparer Blockly et Python
Activité 2 - Prédire le comportement du robot
Unité 3 — Programmation Python et premier script complet
L’étudiant met en pratique ses acquis pour écrire son premier programme complet en Python.
Il apprend à utiliser la bibliothèque pyniryo pour contrôler le robot Ned2, à structurer un script autonome et à comprendre le flux d’exécution d’un code Python à l'aide d'un IDE.
À la fin de ce parcours, l’apprenant est capable de :
✅ Concevoir des programmes structurés et efficaces en Blockly
✅ Comprendre et écrire du code Python de base
✅ Développer un script complet pour piloter le robot Ned2
- Étudiants inscrits: 68

Create your own ROS2 Robotic Stack from scratch
- Length: 25h
- Content Type: Curriculum
- Programming: ROS2
- Equipment: Ned2
🚀 Don’t Just Use Robots... Build Them!
Dive into the world of robotics and learn to design, program, and simulate a Niryo robot in its new ROS2 environment. This course is crafted for college students and tech enthusiasts, opening the door to the latest innovations in robotics.
So, are you ready for the journey? Your adventure starts here!
🎯 Who Is This Course For?
- Bachelor's or Master's students in Robotics, Computer Science, or other STEM-related fields
- Educators looking for a structured, ready-to-use robotics course
- Robotics enthusiasts and fans of the Niryo ecosystem
📚 Course Content
- Setting up your robotics dev environment: Ubuntu 24, ROS2 Jazzy, Gazebo Sim Harmonic
- Modeling a Niryo robot using URDF
- Creating and managing ROS2 packages (with Ament-CMake and colcon)
- Understanding ROS2 architecture and communication protocols
- Installing and configuring the MoveIt2 framework
- Creating a ROS2 Control hardware interface
- Simulating motors and controllers with fake hardware
- Building launch files in Python
- Simulating the complete stack in Gazebo Harmonic
- Enabling ROS2-Gazebo communication via ros-gz bridge
- Intro to motion planning using RRT-Connect with OMPL
Learn by doing. Build real robotic systems. Start mastering ROS2 today!
- Étudiants inscrits: 157

Add-on ROS2 : Perform your first simulated pick and place with the Niryo NED2
- Length: 3h
- Content Type: Add-on
- Programming: ROS2
- Equipment: Ned2 + Vision Set
This add-on introduces a gripper to the simulated robot, enabling basic pick and place functionality. It enhances the realism of the simulation by allowing interaction with objects in the environment.
You will learn how to integrate the gripper, control its motion, and execute simple pick and place tasks using MoveIt2 and Gazebo. This extension is ideal for testing manipulation workflows and preparing for real-world deployment.
Let’s take the simulation a step further.
Course content :
- Adding new components to the robot’s URDF, including the gripper
- Manual setup of ROS2 controllers to control the gripper
- Managing robot poses and action sequences with MoveIt2
- Simulating object physics and interactions in Gazebo
- Using ROS2 services for gripper control and automation
- Étudiants inscrits: 67
Bundle Discovery : Assemblage et Préparation de Commandes
- Length: 6h
- Content Type: Lab
- Programming: Python
- Equipment: Bundle discovery
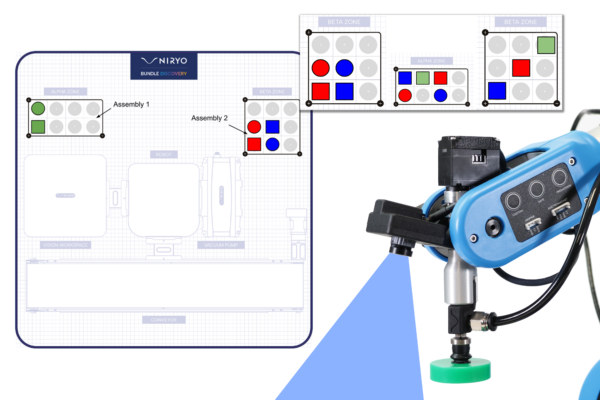
Scénario
On veut réaliser un assemblage qui consiste à disposer des pièces spécifiques (forme et couleur) dans les zones ALPHA et BETA en formant un pattern défini par l’utilisateur. Dans le but de faire cet assemblage , des pièces vont être approvisionnées par un convoyeur jusqu’au robot. Le robot vient ensuite identifier les pièces avant de les saisir. Si la pièce prise n’est pas nécessaire au pattern , Il la déposera dans la zone de rebut sinon il la placera dans les zones ALPHA ou BETA en suivant le pattern donné.

Contenu du TP
Chapitre 1 : Prise et dépose ou “pick and place”
- Définir les repères et les points d’intérêt dans l’espace de travail du robot.
- Créer la séquence des mouvements pour une opération de prise et dépose.
- Effectuer une opération de palettisation.
Chapitre 2 : Définition d’un motif ou pattern
- Créer une fonction de saisie et création d’un pattern par un opérateur.
- Déterminer l’appartenance d’une pièce à un pattern existant.
- Déclencher l’action correspondante à une pièce en fonction des cas suivants: non appartenance à un pattern, appartenance à un pattern et déjà traitée, appartenance à un pattern et non traitée.
Chapitre 3 : Vision
- Effectuer l’apport de la pièce via le convoyeur
- Maîtriser le résultat de la détection d’objets du kit vision : forme, couleur et position d’une pièce dans un workspace défini.
- Effectuer la prise d’une pièce identifiée par la caméra.
Chapitre 4 : Intégration
- Réaliser de manière automatisée un pattern saisi par un opérateur, en utilisant les pièces approvisionnées par le convoyeur.
Prérequis
Python: Syntaxe de base + structure de donnée et de contrôle simple et loop + appel de fonction simple
Équipements requis





- Étudiants inscrits: 162

Prise en main de Blockly avec un Pick and Place
- Length: 2h
- Content Type: Lab
- Programming: Blockly
- Equipment: Bundle STEM
Scénario
L’élève découvre les fonctions de base du bras robotique Ned2. Dans cet exercice, le bras robotique Ned2 effectue une opération simple de prise et de placement d’un objet en utilisant les blocs de base de l’environnement de programmation Blockly “No Code”.
Contenu du TP
Chapitre 1 : Découverte de Blockly
- Présentation de Blockly
- L’environnement de programmation
- Blocs à utiliser
Chapitre 2 : Réalisation de notre première séquence
- Créer une première position pour le bras robotique Ned2
- Créer multiples positions grâce au bouton « FreeMotion » et le bouton « Save »
- Ouvrir et fermer le Gripper Custom
- Réaliser une séquence en boucle
- Ajouter des commentaires dans la séquence
Chapitre 3 : C’est à toi!
- Réaliser une sequence de Pick and Place
Équipements requis

- Étudiants inscrits: 129

Commande gestuelle du Ned2 avec Arduino
- Content Type: Lab
- Programming: Arduino
- Equipment: Bundle discovery
Scenario :
L’élève découvre comment connecter et communiquer des instructions simples entre un Arduino et le Raspberry Pi du Ned2. Dans cet exercice, le bras robotique Ned2 en fonction du geste fait par l’opérateur, réalise
différentes opérations avec des flacons. Le Bras Robotique est programmé avec Blockly et l’Arduino est programmé en C++.
Cet exercice simule l’interaction d’un opérateur d’une chaîne de montage avec un robot pour optimiser le “TAKT TIME”.
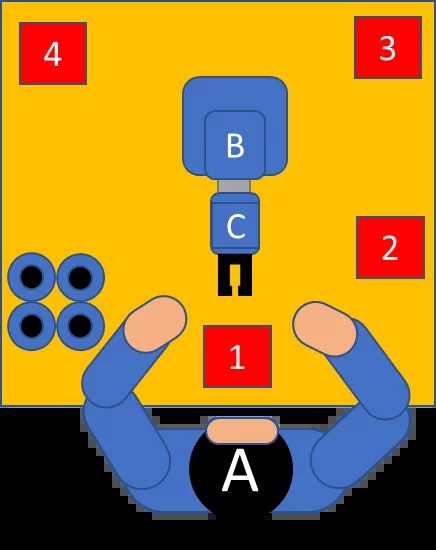
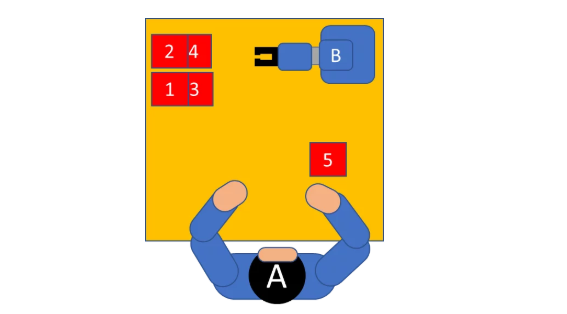
L’opérateur travaille sur une ligne d’assemblage qui prépare 3 produits : Parfum, Eau de Cologne et Eau de Toilette. En fonction de la préparation, le bras robotique Ned2 (B) doit :
- Dans le cas du parfum : prendre le flacon de la position 1 et le positionner à gauche de l’opérateur en position 4.
- Dans le cas de l’Eau de Cologne : prendre le flacon de la position 1, le déplacer de droite à gauche et le tourner plusieurs fois, puis le positionner à droite de l’opérateur en position 2.
- Dans le cas d’une eau de toilette : prendre le flacon de la position 1, l’agiter avec le flacon à l’horizontale et le placer dans le coin arrière droit de la table en position 3.

Pour indiquer au bras robotique NED2 d’effectuer l’une des trois opérations, l’opérateur fait un geste de la main devant le capteur de gestes situé sur bras robotique NED2, geste qui est interprété par Ned2 Robotic Arm.
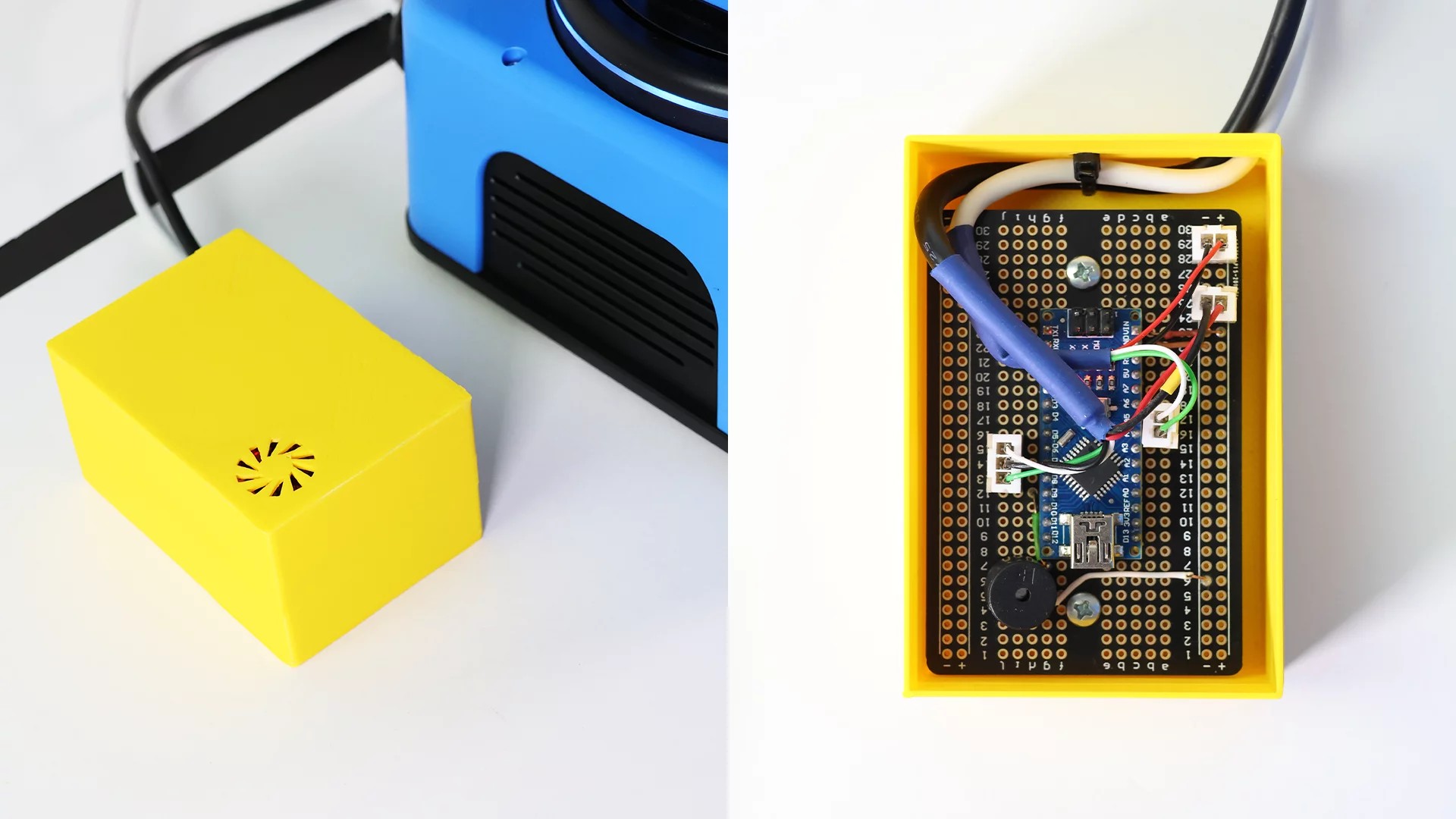
Le capteur gestuel est connecté à un Arduino Nano et l’Arduino Nano est connecté aux broches numériques sur le panneau arrière du bras robotique Ned2.
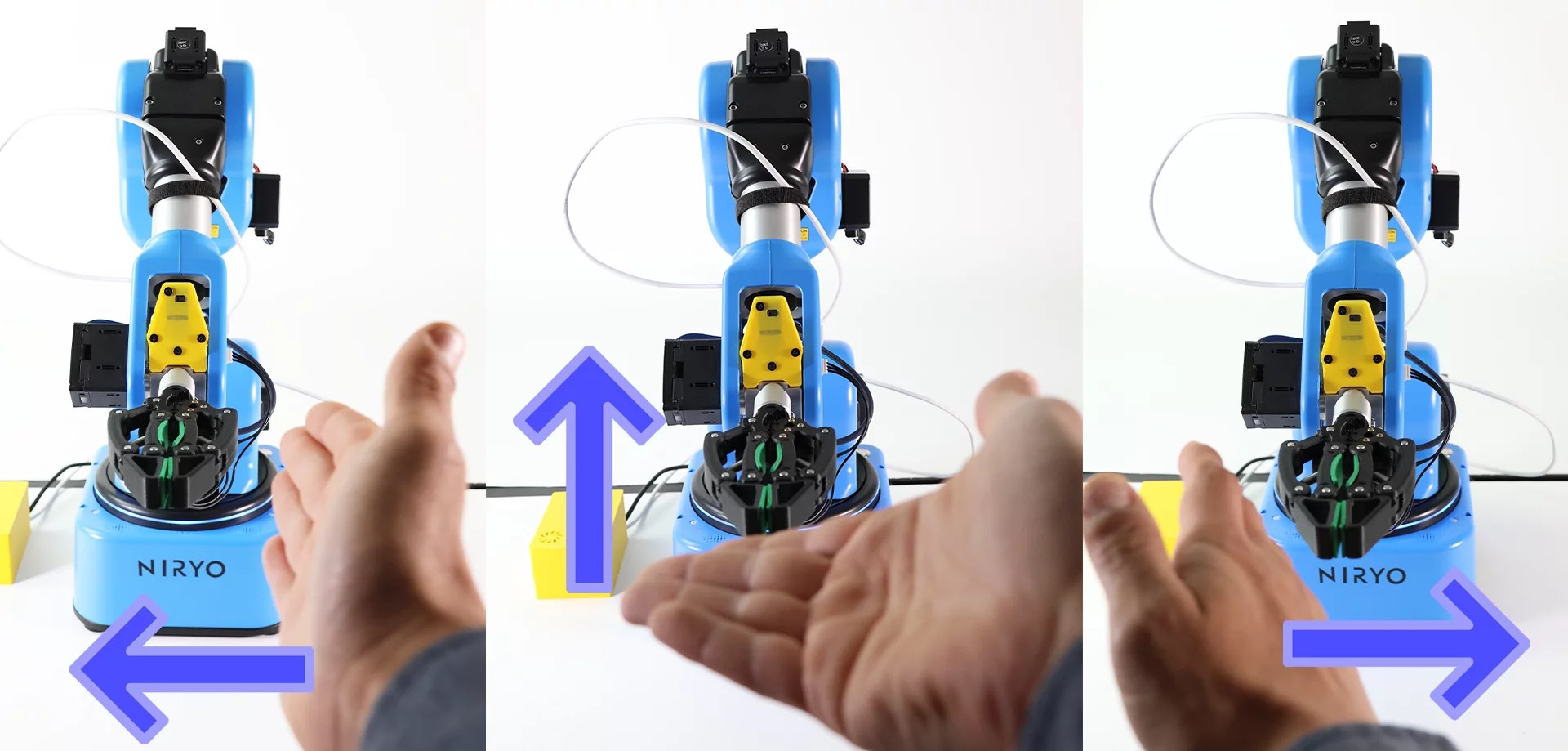
Le capteur gestuel est capable d’interpréter 9 gestes :
- Haut
- Bas
- Gauche
- Droite
- Vers l’avant
- Vers l’arrière
- Rotation dans le sens des aiguilles d’une montre
- Rotation dans le sens inverse des aiguilles d’une montre
- Ondulation
Dans cet exercice, nous n’utiliserons que 4 gestes :
- Haut
- Bas
- Gauche
- Droite
Il y a deux gestes, haut et bas, que nous allons utiliser pour le même mouvement du bras robotisé NED2, puisque, pendant les tests, les opérateurs ne se souvenaient pas s’ils devaient déplacer leur main de haut en bas ou de bas en haut.
Contenu du TP
Chapitre 1 : Découverte de Blockly
- Présentation de Blockly
Chapitre 2 : Création du module de reconnaissance de geste
- Créer un accessoire pour le bras robotique NED2 capable de donner des ordres au Bras Robotique NED2 grâce à un microcontrôleur Arduino et un capteur PAJ7620.
Chapitre 3 : Création des séquences de mouvement du bras robotique NED2
- Réaliser une sequence de trajectoires
Équipements requis
 Ned 2
Ned 2
 Gripper adaptatif (ou Autre)
Gripper adaptatif (ou Autre)
![]() NiryoStudio
NiryoStudio![]() Arduino Nano
Arduino Nano
Autre :
- Protoboard de 400 points (30 rangées)
- Piezo Buzzer
- Capteur de mouvement PAJ7620
- Câbles mâle-mâle et mâle-femelle
Prérequis :
L’installation de l’environnement de programmation d’Arduino, ainsi que le téléversement du programme de Arduino n’est pas expliquée dans ce document.
Il est fortement recommandé de réaliser le TP prise en main de Blockly et le TP Commande du Ned2 avec boitier Arduino avant la réalisation de ce TP si vous n’avez pas l’habitude d’utiliser Blockly.
Installation :
- Placer le bras robotique Ned2 sur une table. Le bras robotique Ned2 doit avoir un périmètre libre d’obstacles d’environ 60 centimètres de rayon.
- Brancher le bras robotique Ned2 au boîtier de sécurité du bras robotique NED2
- Brancher le boîtier de sécurité du bras robotique NED2 à l’alimentation électrique du bras robotique NED2
- Brancher à l’alimentation électrique du bras robotique NED2 au réseau électrique
- Connecter le bras robotique Ned2 à NiryoStudio
- Connecter le boîtier Arduino au bras robotique Ned2 (Une fois monté le boîtier)
- Étudiants inscrits: 52
Commande du Ned2 avec boitier de contrôle Arduino
- Content Type: Lab
- Programming: Arduino
- Equipment: Bundle STEM
Scenario
L’élève découvre comment connecter et communiquer des instructions simples entre un Arduino et le Raspberry Pi du Ned. Dans cet exercice, le bras robotique Ned2 reçoit des instructions d’un Arduino pour, soit ramener des flacons à un opérateur, soit de prendre des flacons de devant l’opérateur, les remuer, et les placer dans un carton. Le Bras Robotique est programmé avec Blockly et 1’Arduino est programmé en C++.

L’opérateur doit remplir des flacons, mélanger le contenu dans le flacon en le secouant et puis déposer les flacons dans un carton.
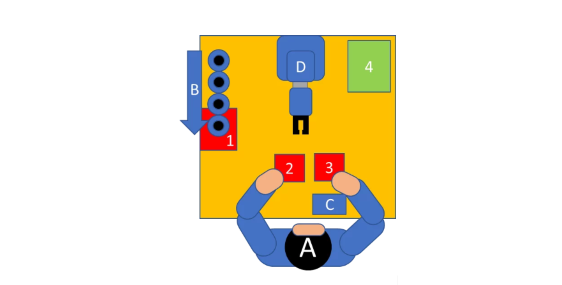
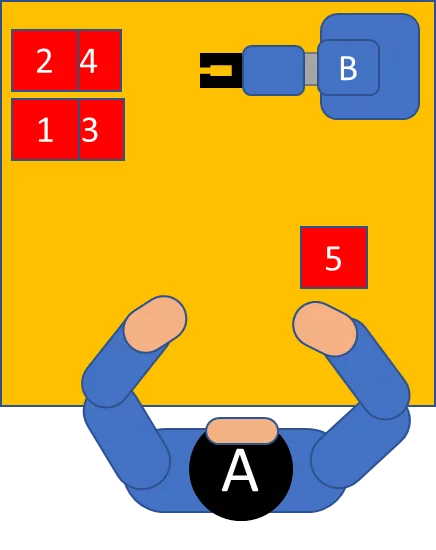
A : Operateur d’une chaine de montage,
B : chute de flacons
C : Boitier de contrôle du bras robotique NED2
D : bras robotique NED2
1 : Zone de prise des flacons
2 : Zone de pose de flacon
3 : Zone de prise de flacon pour ensuite le remuer
4 : Zone de pose du flacon remué (carton)
Si l’opérateur touche le bouton1 du boitier de contrôle, le bras robotique prends des flacons de la zone 1 et les dépose dans la zone 2 jusqu’á que l’opérateur touche le bouton R.
Si l’opérateur touche le bouton2 du boitier de contrôle, le bras robotique prends des flacons de la zone 3 les secoue et les dépose dans la zone 4 jusqu’á que l’opérateur touche le bouton R.
Si l’opérateur touche le bouton R juste après avoir touché le bouton 1 ou le bouton 2, le bras robotique NED2 effectue seulement l’opération choisie une seule fois.
Contenu du TP
Chapitre 1 : Découverte de Blockly
- Prise en main de Blockly
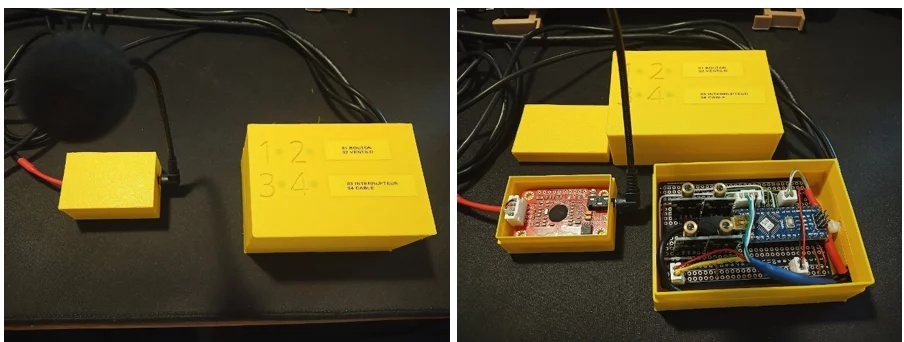
Chapitre 2 : Création du boitier de contrôle du bras robotique NED2
- Monter un boitier de contrôle qui donnera des ordres au Bras Robotique NED2 grâce à un microcontrôleur Arduino et 3 boutons capacitifs.
Chapitre 3 : Création des séquences de mouvement du bras robotique NED2
- Créer une séquence de mouvement en Blockly
- Créer l’interface code entre le bloc Arduino et le Ned2.
Équipements requis
 Ned 2
Ned 2
 Gripper adaptatif (ou Autre)
Gripper adaptatif (ou Autre)
![]() NiryoStudio
NiryoStudio![]() Boitier de contrôle (à monter)
Boitier de contrôle (à monter)![]() Arduino Nano
Arduino Nano
Boitier de contrôle
- Arduino Nano (le même code est utilisable sur Arduino UNO ou MEGA)
- Protoboard de 400 points (30 rangées)
- Piezo Buzzer
- Led vert
- Led rouge
- Deux résistances de 220k
- 3 capteurs capacitifs TTP223B
- Câbles mâle-mâle et mâle-femelle
- Boîtier imprimé en 3D (Optionnel. Modèle téléchargeable sur docs.niryo.com)
Prérequis
- Bases de la construction de circuits electroniques.
- L’environnement de programmation de Arduino, ainsi que le téléversement de programmes sur la carte Arduino, qui n’est pas expliquée dans ce document.
- Il est fortement recommandé de réaliser le TP d’introduction à Blockly avant la réalisation de ce TP si vous n’avez jamais utilisé Blockly auparavant.
Installation
- Placer le bras robotique Ned2 sur une table. Le bras robotique Ned2 doit avoir un périmètre libre d’obstacles d’environ 60 centimètres de rayon.
- Brancher le bras robotique Ned2 au boîtier de sécurité du bras robotique NED.
- Brancher le boîtier de sécurité du bras robotique NED2 à l’alimentation électrique du bras robotique NED2.
- Brancher à l’alimentation électrique du bras robotique NED2 au réseau électrique.
- Connecter le bras robotique Ned2 à NiryoStudio.
- Connecter le boîtier Arduino au bras robotique Ned2 (Une fois le boîtier monté).
- Étudiants inscrits: 37

Découverte des 6 axes du Bras Robotique NED2
- Content Type: Lab
- Programming: Blockly
- Equipment: Bundle STEM
L’élève découvre le concept des 6 axes et comment il s’applique au Ned2.
Dans cet exercice, le bras robotique Ned2 va être utilisé pour déplacer un objet, puit sera positionné en singularité.
Contenu du TP
Chapitre 1 : Le Bras Robotique à Six Axes : Une Imitation du Bras Humain
- Comprendre le concept des 6 axes et comment il s’applique au Ned2.
Chapitre 2 : Activités : Les 6 axes du Bras Robotique Ned2
- Découvrir les mouvements directs
Chapitre 3 : L'Enveloppe de Travail et les Singularités
- Découvrir les concepts d’enveloppe de travail et de singularité.
Chapitre 4 : Activité : Création d’une singularité
- Faire réaliser un mouvement « inutile » au Bras Robotique NED2.
Equipement requis
 Ned 2
Ned 2 Adaptative gripper (or other)
Adaptative gripper (or other)![]() NiryoStudio
NiryoStudio
Installation
- Placer le bras robotique Ned2 sur une table. Le bras robotique Ned2 doit avoir un périmètre libre d’obstacles d’environ 60 centimètres de rayon.
- Brancher le bras robotique Ned2 au boîtier de sécurité du bras robotique NED2
- Brancher le boîtier de sécurité du bras robotique NED2 à l’alimentation électrique du bras robotique NED2
- Brancher à l’alimentation électrique du bras robotique NED2 au réseau électriqu
- Connecter le bras robotique Ned2 à NiryoStudio
- Étudiants inscrits: 107
Commande vocale du Ned2 avec Arduino
- Length: 4h
- Content Type: Lab
- Programming: Arduino
- Equipment: Bundle STEM
Scenario
L’élève découvre comment connecter et communiquer des instructions simples entre un Arduino et le Raspberry Pi du Ned2. Dans cet exercice, le bras robotique Ned2 en fonction du mot dit par l’opérateur, amène à la portée de l’opérateur des bacs avec des pièces. Le Bras Robotique est programmé avec Blockly et l’Arduino est programmé en C++.
Cet exercice simule l’interaction d’un opérateur d’une chaine de montage avec un cobot pour optimiser le “TAKT TIME”.
L’opérateur (A) travaille sur une ligne d’assemblage de petit électroménager. Cet opérateur est en fin de ligne et teste les produits finis. Sur le produit, 4 éléments peuvent présenter un défaut. Si l’opérateur détecte un souci, il/elle demande au bras robotique de lui fournir un composant pour remplacer l’élément défectueux.
Les 4 éléments qui peuvent être remplacés sont dans des conteneurs dans les positions 1, 2 3 et 4. L’opérateur, quand il nome un composant défectueux (par exemple : Bouton, Ventilateur, Switch, Câble) le bras robotique NED2 (B) prend le conteneur avec le composant demandé et le positionne pendant 5 secondes en la position 5 a fin que l’opérateur puisse prendre une pièce du conteneur.

Le module de reconnaissance vocale est connecté à un Arduino Nano et l’Arduino Nano est connecté aux broches numériques du panneau arrière du bras robotique Ned2.
Le module de reconnaissance vocale doit être entraîné avec la voix de l’opérateur. Pour cela, à l’aide du microphone, le programme d’entraînement fourni avec le driver du module Elechouse v3 demande à l’opérateur de dire chaque mot pour identifier un bac plusieurs fois.
Contenu du TP
Chapitre 1 : Découverte de Blockly
- Présentation de Blockly
Chapitre 2 : Création du module de reconnaissance vocale
- Créer un accessoire pour le Bras Robotique NED2 capable de donner des ordres au Bras Robotique NED2 grâce à un microcontrôleur Arduino et module de reconnaissance vocale ELECHOUSE v3.
Chapitre 3 : Création des séquences de mouvement du bras robotique NED2
- Réaliser une sequence de Pick and Place
Equipement requis
 Ned2
Ned2
 Gripper adaptatif
Gripper adaptatif
![]() NiryoStudio
NiryoStudio
![]() Arduino Nano
Arduino Nano
 ELECHOUSE v3
ELECHOUSE v3
Prérequis
- L’installation de l’environnement de programmation d’Arduino, ainsi que le téléversement du programme de Arduino n’est pas expliquée dans ce document.
- Il est fortement recommandé de réaliser le TP prise en main de Blockly et le TP Commande du Ned2 avec boitier Arduino avant la réalisation de ce TP si vous n’avez pas l’habitude d’utiliser Blockly.
Installation
- Placer le bras robotique Ned2 sur une table. Le bras robotique Ned2 doit avoir un périmètre libre d’obstacles d’environ 60 centimètres de rayon.
- Brancher le bras robotique Ned2 au boîtier de sécurité du bras robotique NED2
- Brancher le boîtier de sécurité du bras robotique NED2 à l’alimentation électrique du bras robotique NED2
- Brancher à l’alimentation électrique du bras robotique NED2 au réseau électrique
- Connecter le bras robotique Ned2 à NiryoStudio
- Connecter le boîtier Arduino au bras robotique Ned2 (Une fois monté le boîtier)
- Étudiants inscrits: 25